前端
struts
newman
NAND
redis
嵌入式Linux SPI驱动
云笔记
题解
图书馆座位预约
rviz
寒武纪笔试
MCAL
#产品思维
shell 实现
基本指令
数据库通用命令
文件挂载
敏捷流程
重定位
信号完整性
Realsense
2024/4/13 10:23:01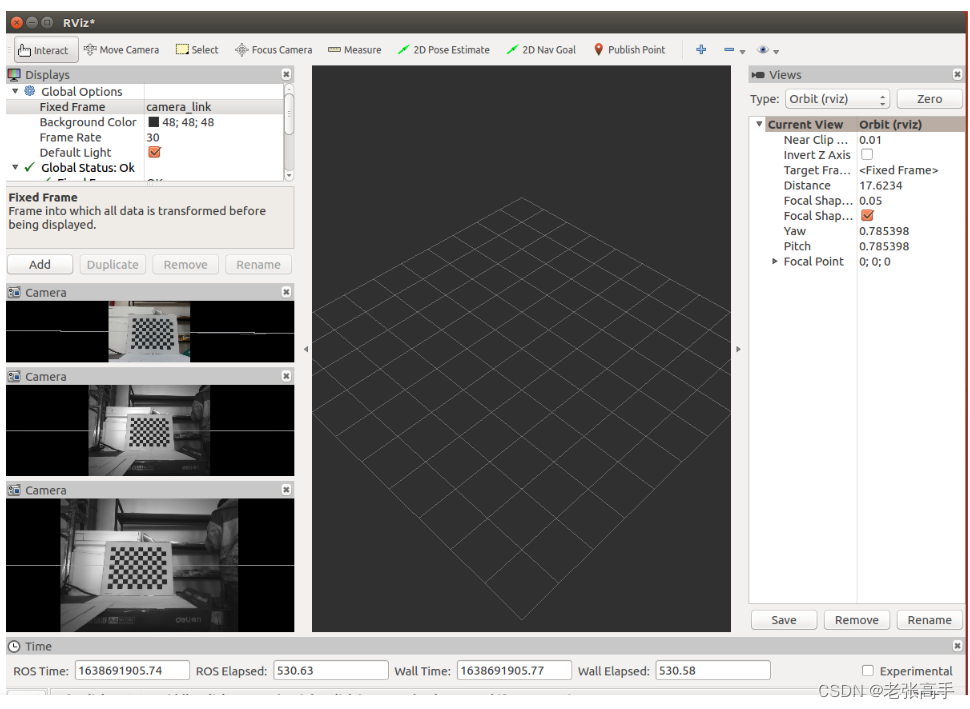
Intel Realsense D405 在Ubuntu18.04下使用kalibr标定
目录 一. 在ubuntu下使用kalibr标定realsense_ros的安装总结下面是标定步骤 一. 在ubuntu下使用kalibr标定
在Realsense官网上librealsense现在D405只接受ROS2下的环境(相机确实很新)
在ROS1下我想到了改设备ID号的方式进行标定
这里需要注意libreals…
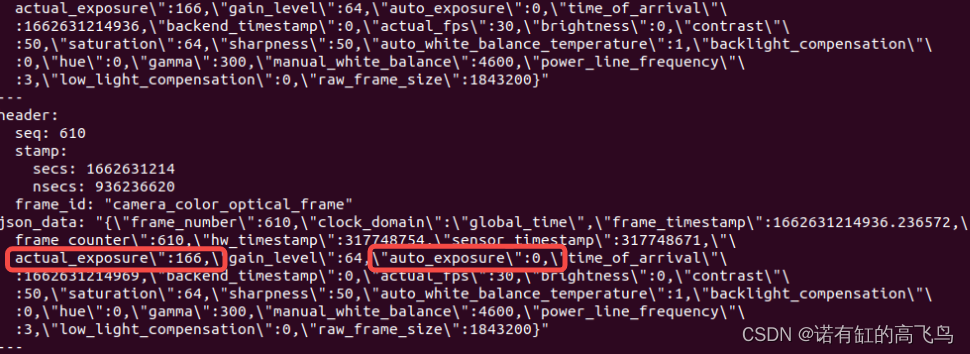
realsenseD435i ros auto_exposure设置
目录写在前面问题解决方法参考完写在前面
1、本文内容 realsense取消自动曝光设置
2、平台 linux,realsenseD435i 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/126767225
问题
用realsense-ros的rs_camera.launch的图像是…
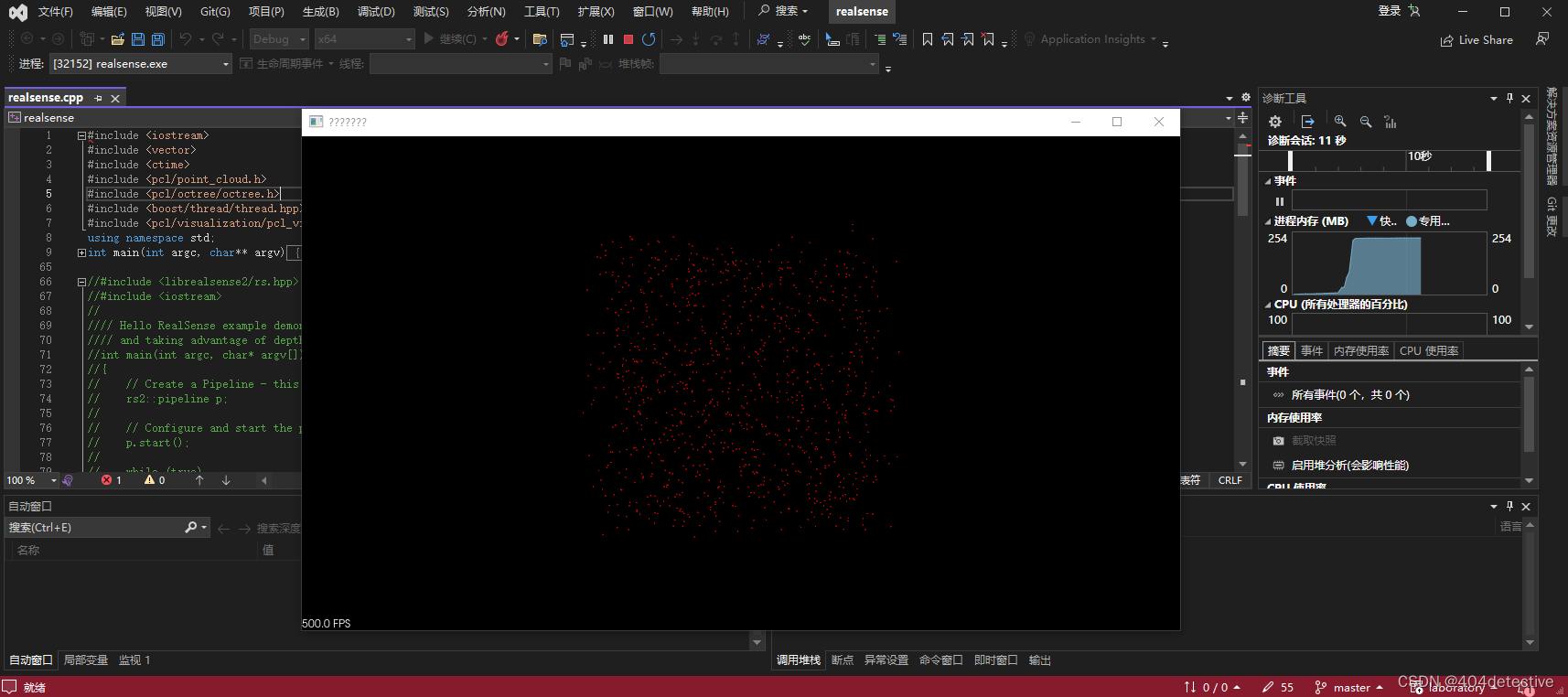
RealSense最简单配置环境只需要5分钟,不用自行添加任何包含目录、库目录。Visual Studio2022、C++。
又开始搞点云了,现在用的是Intel的realsense。
看网上步骤都挺繁琐的,本文搭建只需要3分钟。直接用官方提供的属性表,不用自行添加任何包含目录、库目录。
第一分钟:用Visual Studio新建一个工程(此时你是没有intel.…

Ubuntu 20.04 配置 realsense
一、安装 librealsense
参考 librealsense 的 github 官方教程
librealsense/doc/distribution_linux.md at master IntelRealSense/librealsense GitHub
创建服务器公钥
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsens…
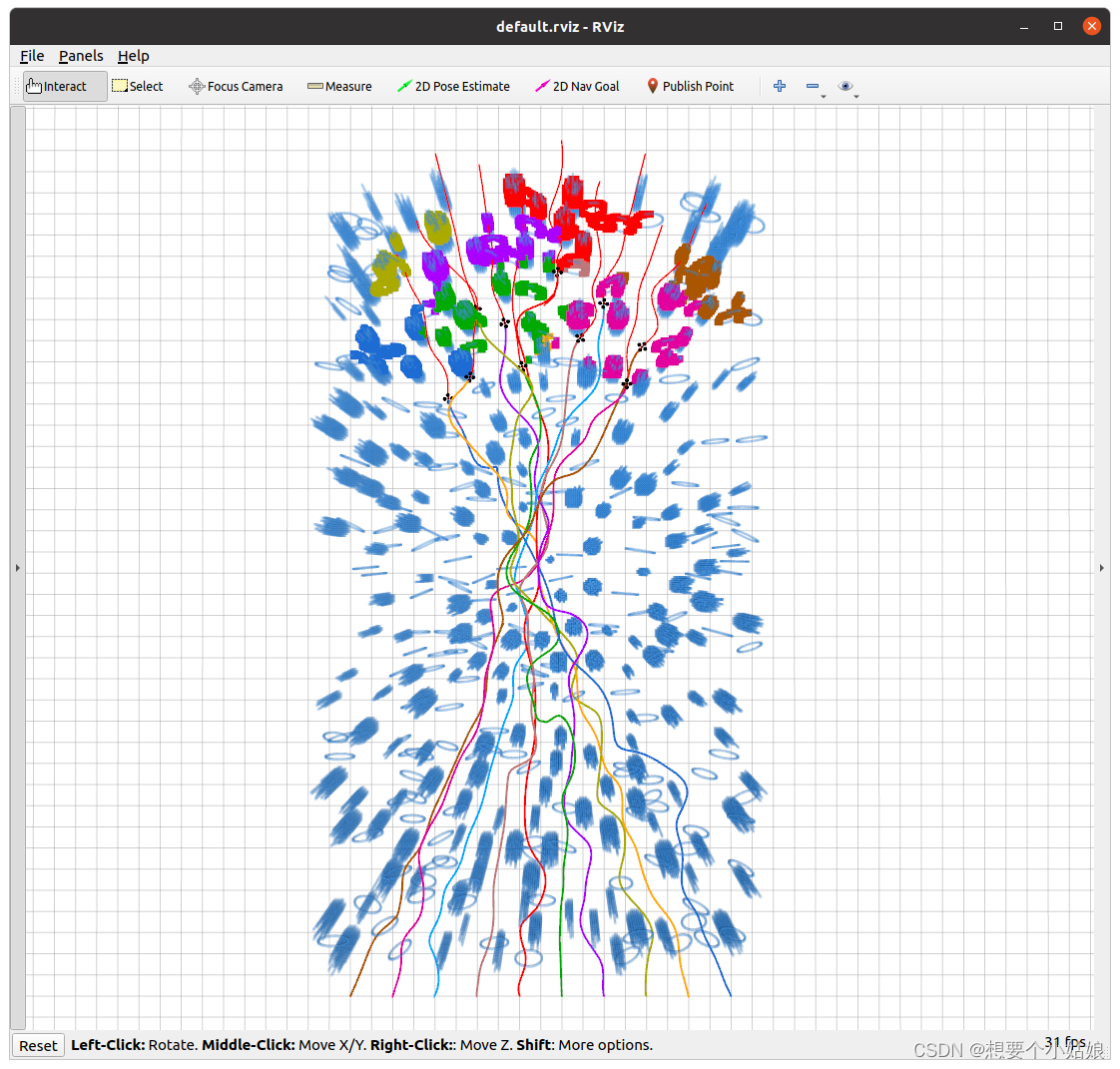
Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言
EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数…

ubuntu18.04+realsenseD455制作TUM数据集
教程目录 一、本机环境二、安装RealSense SDK三、录制rosbag四、制作数据集四、安装ROS-RealSense五、测试数据集一、本机环境 Ubuntu系统ROS系统RealSense18.04melodicD455二、安装RealSense SDK
1、首先注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.co…