python
vulnhub
机器视觉
集群模式
kprobe
CubeMX
分享
ico
USB
双目相机
零代码
模板
openresty
购书网站
Pascal
BH1750
nullptr
QScintilla
App应用程序
事务
urdf
2024/4/12 8:36:00
ROS与GAZEBO实时硬件仿真(1)——urdf的编写
版权声明: https://blog.csdn.net/wubaobao1993/article/details/80947968 写在前面 接触gazebo也差不多有一年之久了,当时使用gazebo是因为比赛的时候,机械的进度没有那么快,此时算法不能停啊,因此就用了gazebo的实时…
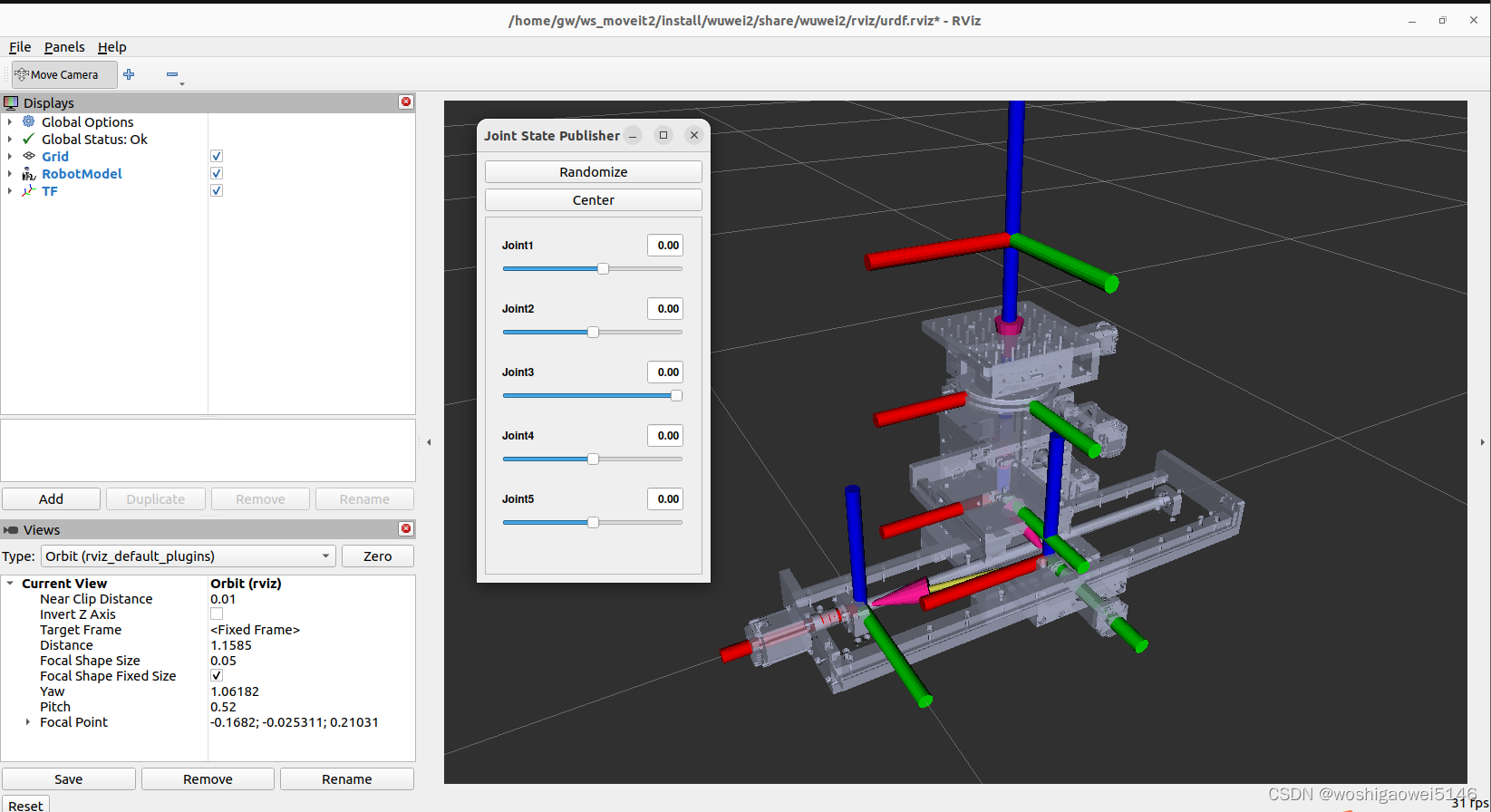
Solidworks导出URDF总结(Humble)
环境
Solidwoks2021 SP5;Ubuntu22.04;ROS2 Humble;
步骤
基本步骤参考:Solidworks导出URDF总结(Noetic) 本文只介绍不同之处。
将solidworks生成的文件夹(我这里为wuwei2)移动到/ws_moveit2…

一起来从Solidworks中导出URDF模型
这个博客是用来记录关于【从Solidworks中导出URDF模型】的学习历程:
相关课程链接见:如何从Solidworks导出URDF模型 • 古月 (guyuehome.com) 下面让我们一起开始吧!!! 1. sw_urdf_exporter插件介绍 插件下载链接&…
ROS与GAZEBO实时硬件仿真(3)——将gazebo和ros连接起来
版权声明: https://blog.csdn.net/wubaobao1993/article/details/81054570
写在前面
通过上两节的博客,相信朋友们已经对gazebo的一些标签有了较为深入的认识,但是特别是上一节,程序写完了之后发现并没有什么特别的变化。着实&a…
ros2+gazebo+urdf:ros2机器人使用gazebo的urdf文件中的<gazebo>部分官网资料
原文链接SDFormat extensions to URDF (the gazebo tag) — Documentation
注意了ros2的gazebo部分已经跟ros1的gazebo部分不一样了: Toggle navigation SpecificationAPIDocumentationDownload
Back
Edit Version: 1.6 Table of C…
【ROS】URDF:统一机器人描述格式(XML)
1、简述
统一机器人描述格式(URDF)是描述机器人模型的 XML 文件,支持Xacro(XML宏),使用Xacro来引用已经存在的XML块,创建更短且可读的XML文件。
2、初始URDF描述文件
URDF描述文件为XML格式&…

ROS与GAZEBO实时硬件仿真(2)——urdf的gazebo属性
版权声明: https://blog.csdn.net/wubaobao1993/article/details/80960584 写在前面 通过上一节的博客,相信朋友们已经对urdf有了一个较为完整的认识,应该也可以自主的写一个urdf文件在ros和gazebo看到了,但是仅仅是这样ÿ…

UR5 机器人 URDF 代码阅读
系列文章目录 文章目录 系列文章目录前言一、UR5 URDF 代码二、base_link三、shoulder_pan_joint四、shoulder_pan_trans五、ROS base_link 坐标系到 UR 机器人 Base 坐标系的转换六、与全零TCP(工具坐标系)重合的工具链接 前言 一、UR5 URDF 代码
<…
ROS导航中 的位姿描述
在ROSwiki中有urdf文件的写法如下 wiki:Create your own urdf file
...<joint name"joint2" type"continuous"><parent link"link1"/><child link"link3"/><origin xyz"-2 5 0" rpy"…
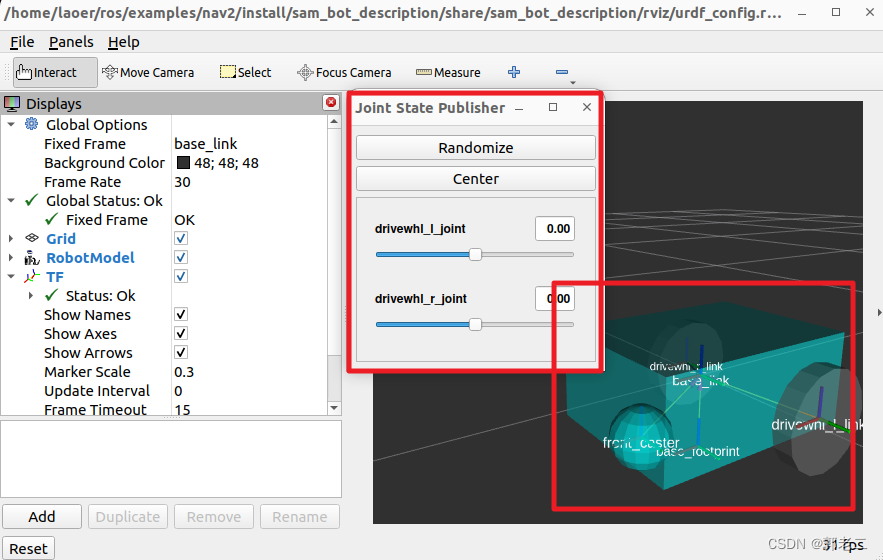
从0手写两轮差速机器人urdf模型
文章目录 前言一、基本理论二、实现步骤1.创建一个机器人建模功能包2.使用圆柱体创建一个车体模型2.同理创建机器人其它构件3.机器人模型添加传感器 前言
最近为找到与自己课题应用场景相适应的机器人结构,对机器人建模方面的内容进行了了解和学习,计划…
Ubuntu下安装urdf可视化软件urdf-viz
Ubuntu下安装urdf可视化软件urdf-viz
urdf-viz是一款开源的可视化URDF/XACRO模型的软件,用户可以利用urdf-viz检查模型的准确性及简单地手动控制;支持Windows/MacOS/Linux,非常好用。
安装方法
urdf-viz 是使用Rust-lang编写,所…