mysql
html5
spark-ml
html
课程设计
kmeans
js
Nanoprobes
Android蓝牙初始化
计算机毕业设计选题
共阴极-共阳极判定
hdfs
资损
在线聊天系统
图片提取
脚本实战
HAL库
电机控制
MVCC
核酸预约检测管理系统
RRT
2024/4/11 22:10:44
基于采样的规划算法之RRT家族(六):总结
从RRT到时空RRT,我们介绍了总共5种RRT家族算法。RRT-Connect、RRT* 、Informed RRT* 都是为了让原始RRT算法花更小的时间找到更短的路径。最后一个时空RRT算法则是为了将RRT算法从空间拓展到时空。 一、RRT家族算法特性
RRT家族算法作为基于采样的规划算法的代表,其核心是:…

动力学约束下的运动规划算法——Kinodynamic RRT*算法
一、RRT * 算法回顾 为了更好的理解Kinodynamic RRT*算法,我们先来回顾一下RRT * 算法 RRT * 先通过Sample函数随机选取一个点Xrand,然后通过Near函数找到当前树上距离Xrand最近的一个点Xnear,再通过Steer函数,沿着从Xnear到Xra…
ROS 和 Gazebo 模拟器实现未知环境探索的快速探索随机树算法
ROS 和同步定位和映射
ROS 最流行的应用之一是 SLAM(同步定位和映射)。 移动机器人中 SLAM 的目标是借助连接到机器人的可用传感器构建和更新未探索环境的地图,该传感器将用于探索。
快速探索随机树算法
快速探索随机树 (RRT) 是一种数据结…
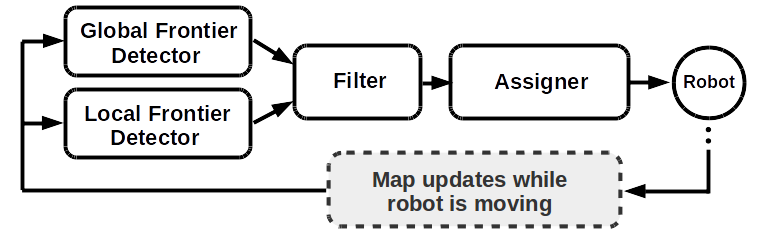
【自主探索】基于 rrt_exploration 的单个机器人自主探索建图
文章目录 一、rrt_exploration 介绍1、原理2、主要思想3、拟解决的问题4、优缺点 二、安装环境三、安装与运行1、安装2、运行 四、配置说明1、Robots Network2、Robots frame names in tf3、Robots node and topic names4、Setting up the navigation stack on the robots5、A …
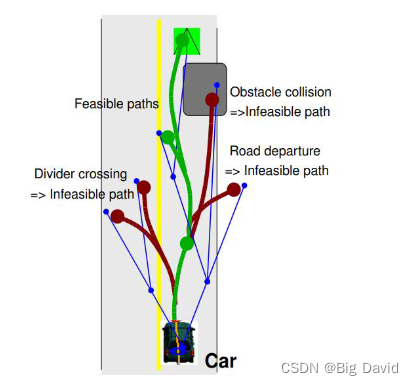
基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT
本文将讲解PRM,RRT,RRT*自动驾驶规划算法原理,不正之处望读者指正
0 前言 机器人运动规划的基本任务:从开始位置到目标位置的运动 (1)如何躲避构型空间出现的障碍物 (2)如何满足机器…