pandas
微信小程序
spi
架构
bootstrap
OV5640
Pull APP
文学
libbinder
.netcore
yarn
虚拟机
Terminal
信号维度
chrome
实时音视频
webrtc
insert into
volatile
flutter
PX4
2024/4/12 1:37:23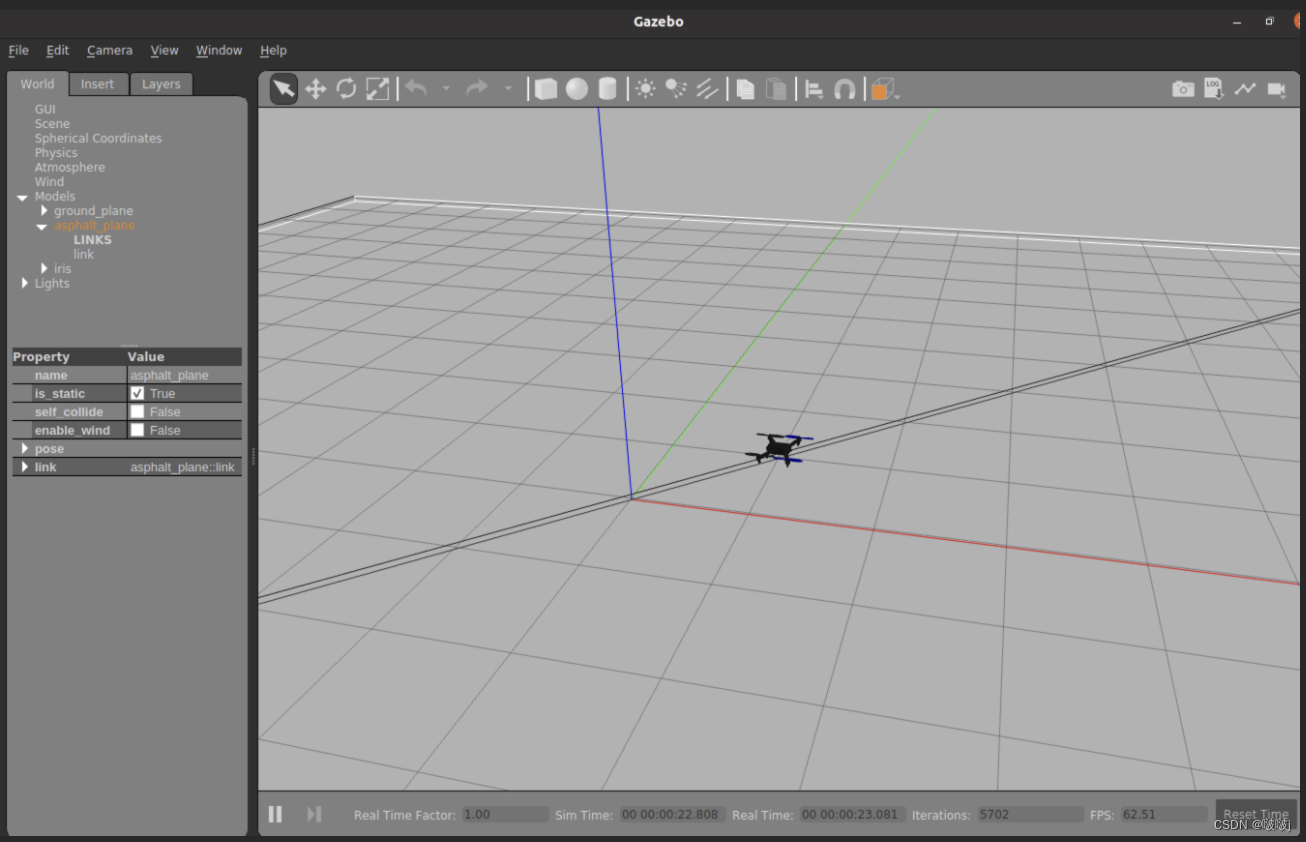
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境:
主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy
虚拟机安装
1. 下载安装 parallels,参考评论;
2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LT…

Jetson Orin NX 开发指南(9): MAVROS 的安装与配置
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…

四旋翼与四元数学习笔记
为了实现四旋翼无人机的编队控制,重点学习了四旋翼加速度转换为姿态角和推力指令的具体手段,详细学习了四元数、旋转矩阵、欧拉角在四旋翼上的应用,学习了四旋翼的几何控制法、姿态角控制器设计,学习了mavros、c中四元数有关内容。…

PX4-航点到达判定代码分析
这里主要分析源代码https://github.com/PX4/Firmware/blob/master/src/modules/navigator/mission_block.cpp
里面的is_mission_item_reached 判断航点是否到达的代码,代码分析如下:
航点到达判断
当飞行器的高度误差小于爬升高度误差时进入航点飞行模…

PX4FMU和PX4IO最底层启动过程分析(下)
PX4FMU和PX4IO最底层启动过程分析(下)
PX4FMU的系统启动函数为nash_main(int argc,char *argv[]) PX4IO的系统启动函数为nash_start(int argc,char *argv[])
PX4FMU启动函数nash_main(int argc,char *argv[])
首先分析一下nash_main(int argc,char *a…
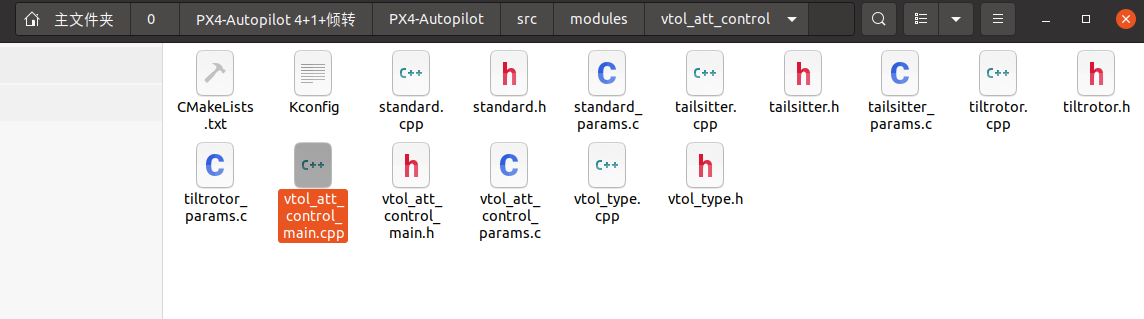
PX4从放弃到精通(二十八):垂起过渡控制
文章目录 前言一、主程序二、update_transition_state()三、update_transition_state() 前言
固件版本:1.14.0 可加名片交流学习
一、主程序
代码位置: 构造函数,用初始化列表进行初始化工作…
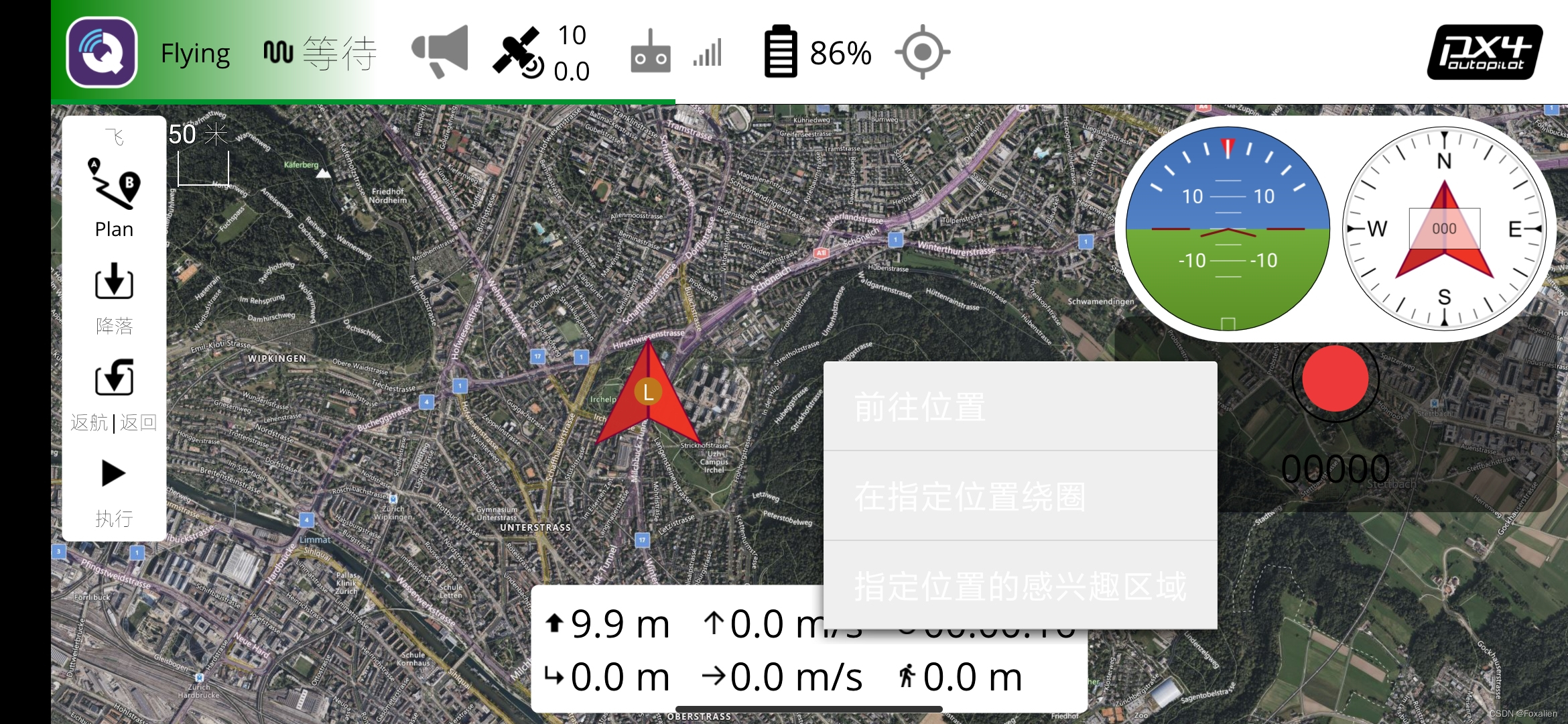
QGC局域网内连接PX4模拟器JMAVSim
环境
QGroundControl 开源地面站系统; 代码地址: https://github.com/mavlink/qgroundcontrolPX4 开源飞控系统; 代码地址: https://github.com/PX4/PX4-Autopilot QGC可以直接下载运行包. PX4 请根据代码中的说明,进行环境的配置和运行. 通过代码去build地面站和PX4的步骤见官…
Pixhawk---fatal: Not a git repository (or any of the parent directories)
原文地址为:
Pixhawk---fatal: Not a git repository (or any of the parent directories)当从github.com上面下载下了Firmware后,无意中删除了Firmware目录下的.git文件夹,再去编译就会出现: fatal: Not a git repository (…
Jetson Orin NX 开发指南(9): MAVROS 的安装、配置与运行
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…
Jetson Orin NX 开发指南(8): Mavros 的安装与配置
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…
PX4 gazebo仿真修改步长
gazebo中的无人机默认是250Hz,采样间隔0.004,为了提高这个值,将 Firmware/Tools/worlds/empty.world 中的值改为如下
<max_step_size>0.002</max_step_size>
<real_time_update_rate>500</real_time_update_rate>要…
PX4编写msg并添加到日志
在 Firmware/msg 文件夹下添加对应的 demo_topic.msg 文件,仿照其他文件定义数据类型;在 Firmware/msg/CMakeLists.txt 下的 set(msg_files ...) 函数中添加 demo_topic.msg;编译固件,会自动生成 demo_topic.h 文件,里…
PX4-Autopilot配置(gazebo)
推荐使用当前版本或stable及release版本;
要clone当前最新(debug)并且下载submodules:
git clone gitgithub.com:PX4/PX4-Autopilot.git --recursive更推荐的做法是,使用release的分支:
git clone --bra…
四、MAVROS与机载电脑通信
MAVROS与机载电脑通信
简介:MAVROS和Jetson nano通信,设置飞控参数和MAVROS文件,实现飞控和机载电脑的通信。MAVROS相当于PX4飞控中的MAVLINK模块。MAVROS将话题转为MAVLINK格式消息发送给飞控,飞控中的MAVLINK模块将MAVLINK格式…

【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述
无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧Wo…

pixhawk2.4.8-地面站配置-APM固件
目录一、硬件准备二、APM固件、MP地面站下载三、地面站配置1 刷固件2 机架选择3 加速度计校准4 指南针校准5 遥控器校准6 飞行模式7 紧急断电&无头模式8 基础参数设置9 电流计校准10 电调校准11 起飞前检查(每一项都非常重要)12 飞行经验四、遇到的问…
ubuntu20.04 安裝PX4 1.13
step1_install_depenences.sh #!/bin/bash
#install gazebo 11
#install protobuf 3.19.6python3 -m pip install --upgrade pip
python3 -m pip install --upgrade Pillow# 將 empy 的版本調整爲3.3.4
pip3 uninstall empy
pip3 install empy3.3.4sudo apt-get update
sudo ap…
在Ubuntu20.04配置PX4环境
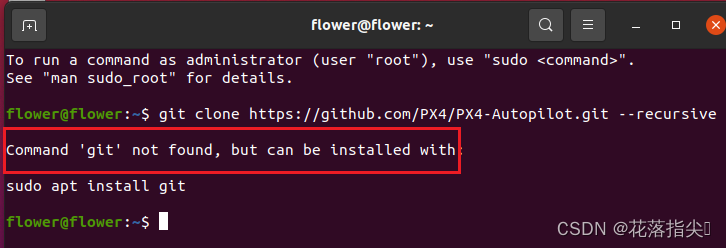
目录 1.下载PX4源码2.安装PX4所有工具链3.编译PX4工程1.下载PX4源码 打开Ubuntu,Ctrl+Alt+T打开终端输入下面代码:
git clone https://github.com/PX4/PX4-Autopilot.git --recursive出现上图中出现“Command ‘git’ not found, but can be installed with”,使用以下代码…
PX4-小型固定翼滑跑起飞问题分析
自动起飞过程中经常出现往一边偏的问题,无法很好的到达takeoff点。
参考代码: src/modules/fw_pos_control_l1/FixedwingPostionControl.cpp 中 control_takeoff 函数 结合航点到达判定函数 src/modules/navigator/mission_block.cpp 可能还需要结合自动…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
PX4仿真添加world模型文件,并使用yolov8进行跟踪
前言
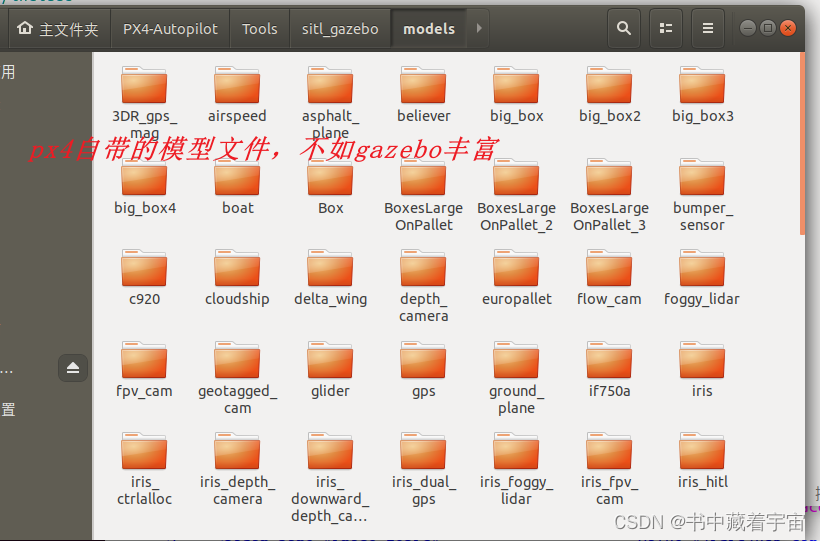
目的:我们是为了在无人机仿真中使用一个汽车模型,然后让仿真的无人机能够识别到这个汽车模型。所以我们需要在无人机仿真的环境中添加汽车模型。
无人机仿真中我们默认使用的empty.world文件,所以只需要将我们需要的模型添加到一起写进这个empty.world文件中去就可以…
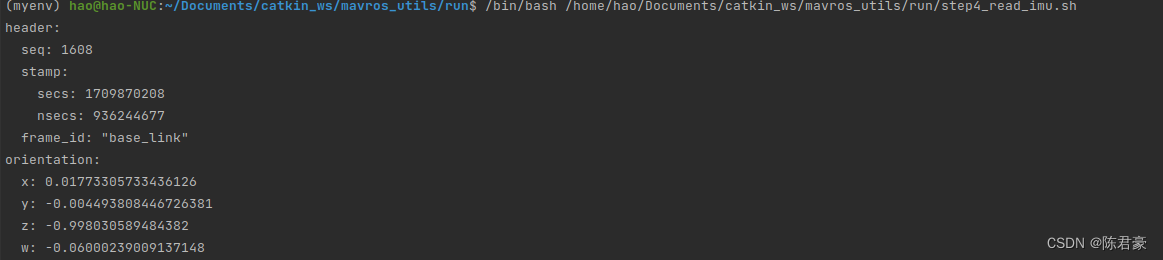
ubuntu設定QGC獲取pixhawk Mini4(PX4 Mini 4) 的imu信息
ubuntu20.04 QGC使用v4.3.0的版本
飛控pixhawk Mini4 飛控上只使用一條micro USB連接電腦,沒有其他線 安裝命令
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libf…

Pixhawk+PX4+VRPN +NOKOV无人机飞控平台动捕数据传输
NOKOV度量动作捕捉系统可以很好的适配PX4无人机飞控平台。进行数据通信的时候,使用SDK或者VRPN的方式都是可以的。本文演示NOKOV度量动作捕捉系统通过VRPN与PX4平台进行数据传输的方法。
一、硬件准备
1、准备无人机
这里准备的无人机,飞控版是Pixhaw…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
PX4加速度计传感器校准原理
理想情况下,传感器的读数与实际物理量相同,但由于一些随机因素的影响,传感器测量到的数据与实际数据存在偏差,且偏差不停变化。偏差大体分为两种,零位偏差和标度偏差。对于一个传感器来说,实际物理量K*传感…

px4+vio实现无人机室内定位
文章主要讲述px4 如何利用vins_fusion里程计数据实现在室内定位功能。
文章基于以下软、硬件展开。
硬件软件机载电脑: Intel NUC系统:Ubuntu 20.04相机: Intel Realsense D435iros:noetic飞控:Pixhawk 2.4.8固件&am…
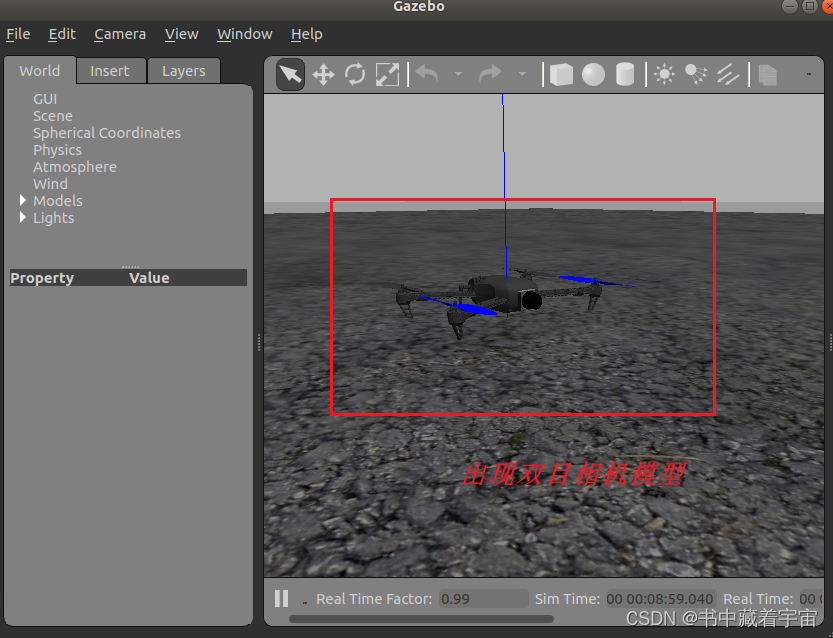
px4的gazebo仿真相机模型报错解决办法,返回值256
👉事情起因:我想做关于PX4无人机的摄像头仿真,根据PX4的官网文件 Tools/sitl_gazebo文件夹里面有对应的模型可以使用,我就想在mavros_posix_sitl文件里面修改vehicle参数,比如直接将vehicle“iris_stereo_camera”。然…
ubuntu下,PX4使用 upload 下载代码没反应
可能原因,没有串口权限
sudo chmod 777 /dev/ttyACM0开启串口权限,本次问题解决。

mavros坐标系转换与方向
2021.05.04更新:
本文中提到的kinetic版本的mavros中body系的坐标系问题已经被修复为FLU坐标系,只需要更新kinetic版本的mavros即可!
sudo apt install ros-kinetic-mavros
sudo apt install ros-kinetic-mavros-msgs
----------原文分界线…

XTDrone PX4 仿真平台|Ubuntu20.04 环境搭建失败记录
XTDrone PX4 仿真平台|Ubuntu20.04 环境搭建失败记录仿真环境搭建依赖安装ROS安装Gazebo安装MAVROS安装PX4配置仿真环境搭建
依赖安装
在使用apt安装的过程中(包括之后ROS的安装),如果出现难以解决的依赖问题,可以使用aptitude …
Ubuntu18.04安装QGC报错 `GLIBC_2.29‘ not found
按照官网教程,最后运行时出错。
/tmp/.mount_QGroun2NOhPP/QGroundControl: /lib/x86_64-linux-gnu/libm.so.6: version GLIBC_2.29 not found (required by /tmp/.mount_QGroun2NOhPP/QGroundControl)
/tmp/.mount_QGroun2NOhPP/QGroundControl: /usr/lib/x86_64-…