Arduino
web安全
腾讯云
堆
自动化测试
ddos
药物化学
性能优化
excel
题集
decodeByteArray
flink watermark
android-studio
mapreduce
supervisor
标准库与HAL库实现
salesforce
命名实体识别
外贸独立站
独立站
决策规划
2024/4/11 22:38:08
【Apollo学习笔记】——规划模块TASK之PATH_REUSE_DECIDER
文章目录 前言PATH_REUSE_DECIDER功能简介PATH_REUSE_DECIDER相关配置PATH_REUSE_DECIDER总体流程PATH_REUSE_DECIDER相关子函数IsCollisionFreeTrimHistoryPathIsIgnoredBlockingObstacle和GetBlockingObstacleS Else参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算…
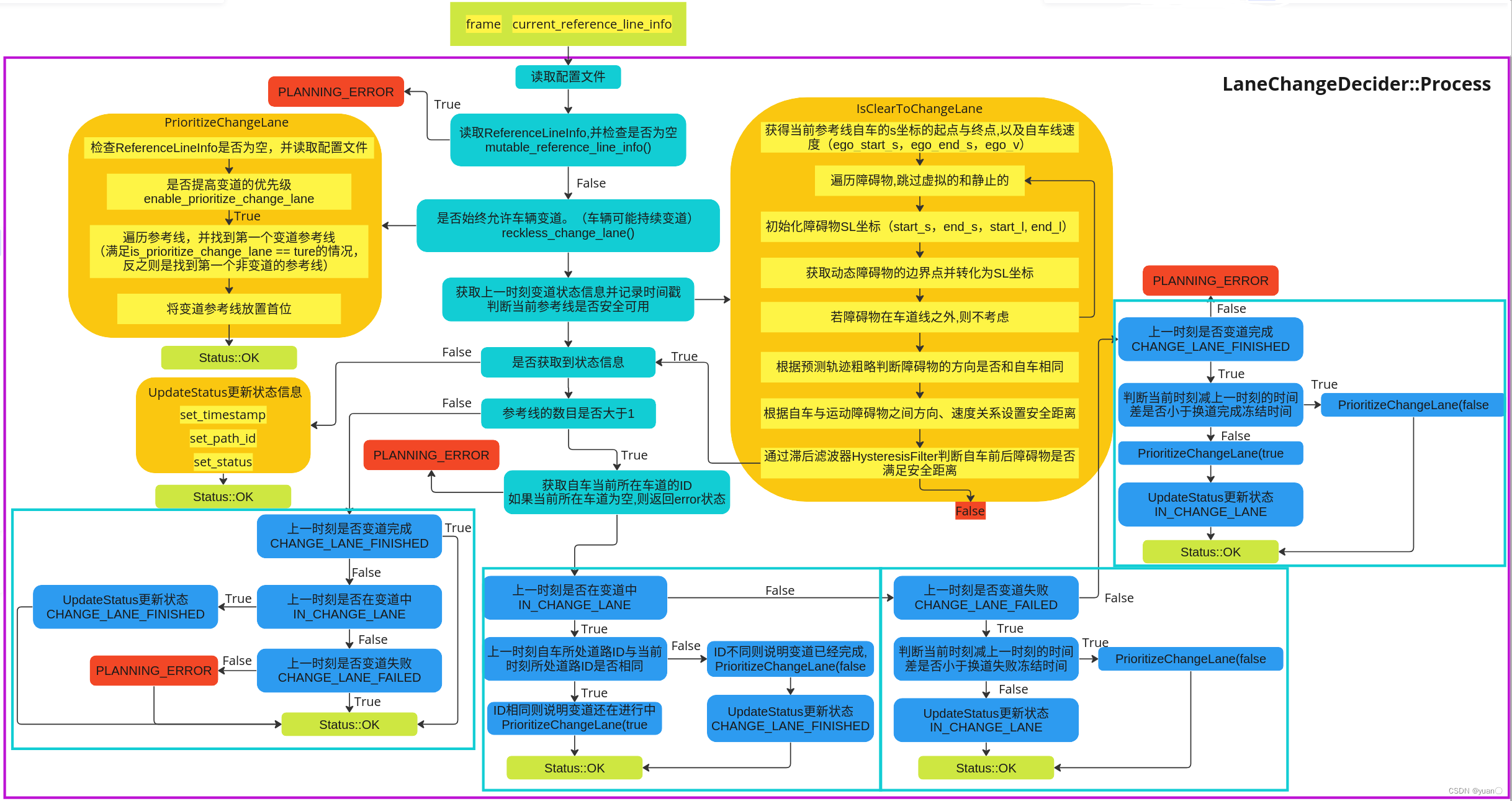
【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
文章目录 前言LANE_CHANGE_DECIDER功能简介LANE_CHANGE_DECIDER相关配置LANE_CHANGE_DECIDER总体流程LANE_CHANGE_DECIDER相关子函数PrioritizeChangeLaneUpdateStatusIsClearToChangeLaneHysteresisFilter 参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实…

【Apollo学习笔记】——规划模块TASK之PATH_ASSESSMENT_DECIDER
文章目录 前言PATH_ASSESSMENT_DECIDER功能简介PATH_ASSESSMENT_DECIDER相关信息PATH_ASSESSMENT_DECIDER总体流程1. 去除无效路径2. 分析并加入重要信息给speed决策SetPathInfoSetPathPointType 3. 排序选择最优的路径4. 更新必要的信息 前言
在Apollo星火计划学习笔记——Ap…

【Apollo学习笔记】——规划模块TASK之RULE_BASED_STOP_DECIDER
文章目录 前言RULE_BASED_STOP_DECIDER相关配置RULE_BASED_STOP_DECIDER总体流程StopOnSidePassCheckClearDoneCheckSidePassStopIsPerceptionBlockedIsClearToChangeLaneCheckSidePassStopBuildStopDecisionELSE:涉及到的一些其他函数NormalizeAngleSelfRotate CheckLaneChang…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(一)
文章目录 TASK系列解析文章前言PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER功能介绍PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER流程确定优化变量定义目标函数定义约束ProcessSetUpStatesAndBoundsOptimizeByQPCheckSpeedLimitF…
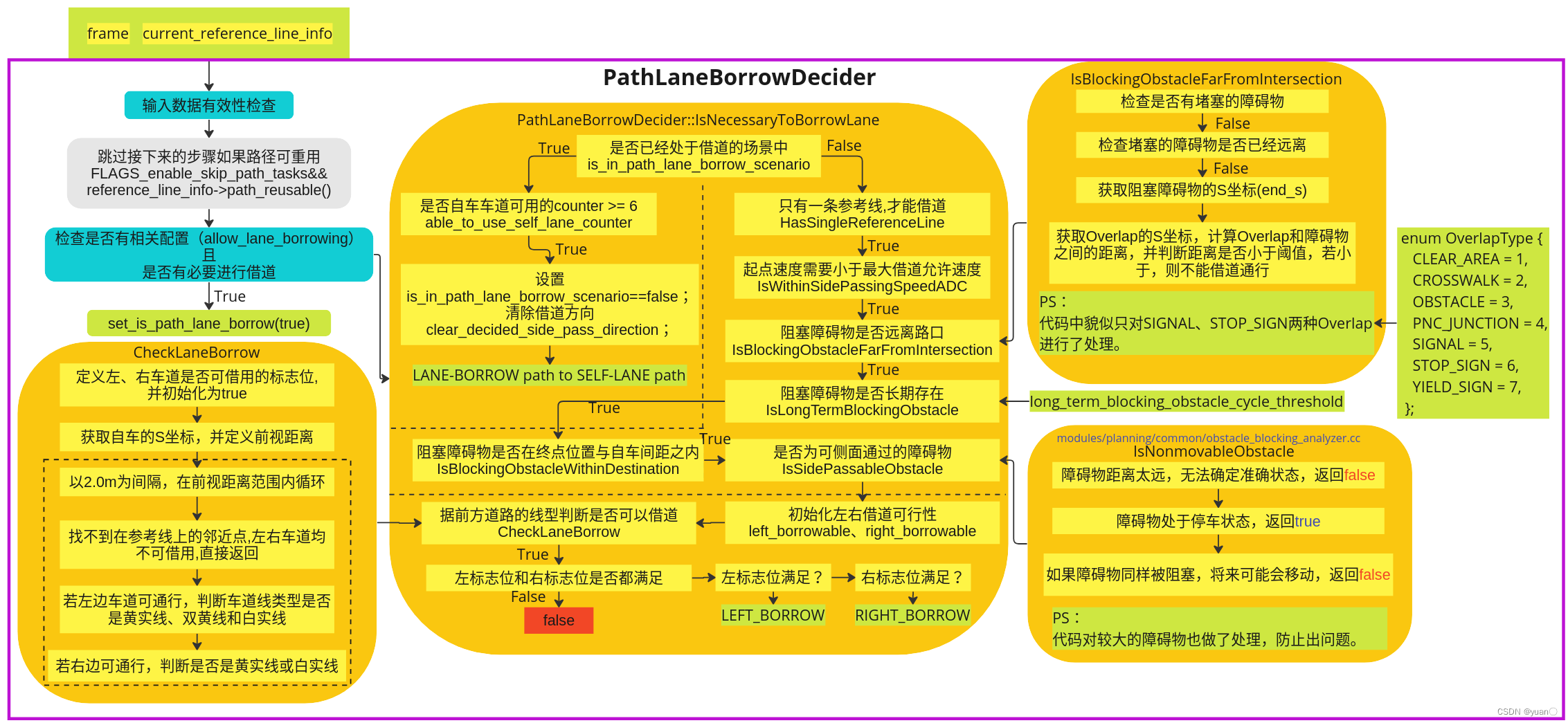
【Apollo学习笔记】——规划模块TASK之PATH_BORROW_DECIDER
文章目录 前言PATH_BORROW_DECIDER功能简介PATH_BORROW_DECIDER相关配置PATH_BORROW_DECIDER总体流程PATH_BORROW_DECIDER相关子函数IsNecessaryToBorrowLaneIsBlockingObstacleFarFromIntersectionIsNonmovableObstacleCheckLaneBorrow 参考 前言
在Apollo星火计划学习笔记—…

【Apollo学习笔记】——规划模块TASK之PATH_DECIDER
文章目录 前言PATH_DECIDER功能简介PATH_DECIDER相关配置PATH_DECIDER总体流程路径决策代码流程及框架MakeStaticObstacleDecision PATH_DECIDER相关子函数参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……S…

基于ros1的 apollo 7.0.0规划控制算法
apollo.ros-7.0.0
上次给大家带来了之前学习apollo时开发的内容apollo.ros-1.0.0和apollo.ros-3.0.0,主要是针对apollo 1.0.0和3.0.0版本进行了ros1下的移植和规划控制算法的学习。本次在之前工作的基础上,针对apollo 7.0.0版本,进行了ros1下…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(二)
文章目录 TASK系列解析文章OptimizeByNLP1.get_nlp_info()定义问题规模2.get_bounds_info()定义约束边界约束3.get_starting_point()定义初值4.eval_f()求解目标函数5.eval_grad_f()求解梯度6.eval_g()求解约束函数7.eval_jac_g()求解约束雅可比矩阵8.eval_h()求解黑塞矩阵9. f…

ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战)
ros2的工程版本说明
之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并…
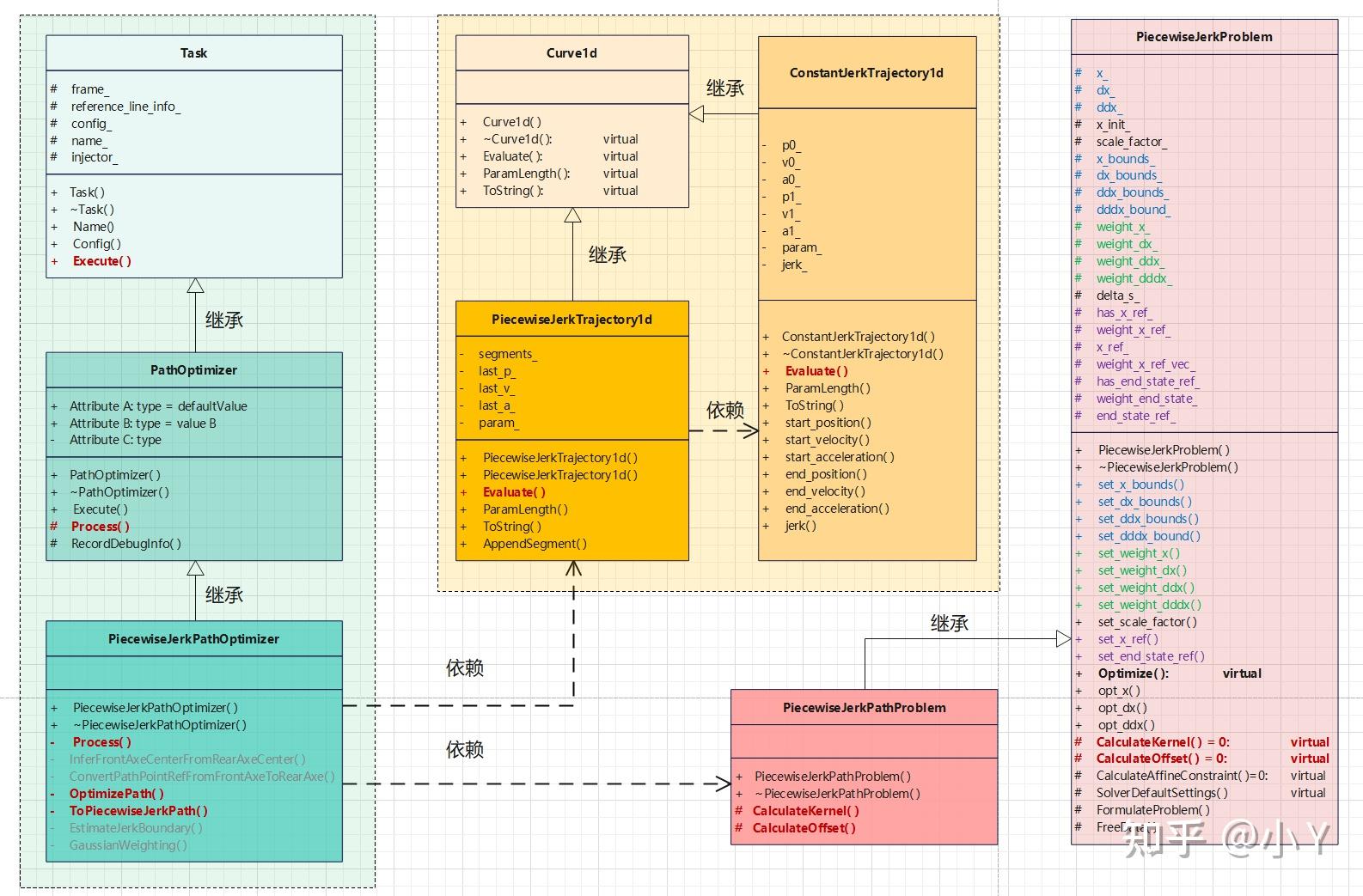
【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_PATH_OPTIMIZER
文章目录 前言PIECEWISE_JERK_PATH_OPTIMIZER功能简介PIECEWISE_JERK_PATH_OPTIMIZER相关配置PIECEWISE_JERK_PATH_OPTIMIZER总体流程OptimizePathpiecewise_jerk_problem二次规划问题标准形式定义优化变量定义目标函数设计约束OptimizeFormulateProblem计算QP系数矩阵Calculat…

【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDERSPEED_BOUNDS_FINAL_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_FINAL_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_FINAL_DECIDER相关配置SPEED_BOUNDS_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBounda…

【论文笔记】Baidu Apollo EM Motion Planner
文章目录 AbstractI. INTRODUCTIONA. Multilane StrategyB. Path-Speed Iterative AlgorithmC. Decisions and Traffic Regulations II. EM PLANNER FRAMEWORK WITH MULTILANE STRATEGYIII. EM PLANNER AT LANE LEVELA. SL and ST Mapping (E-step)B. M-Step DP PathC. M-Step …
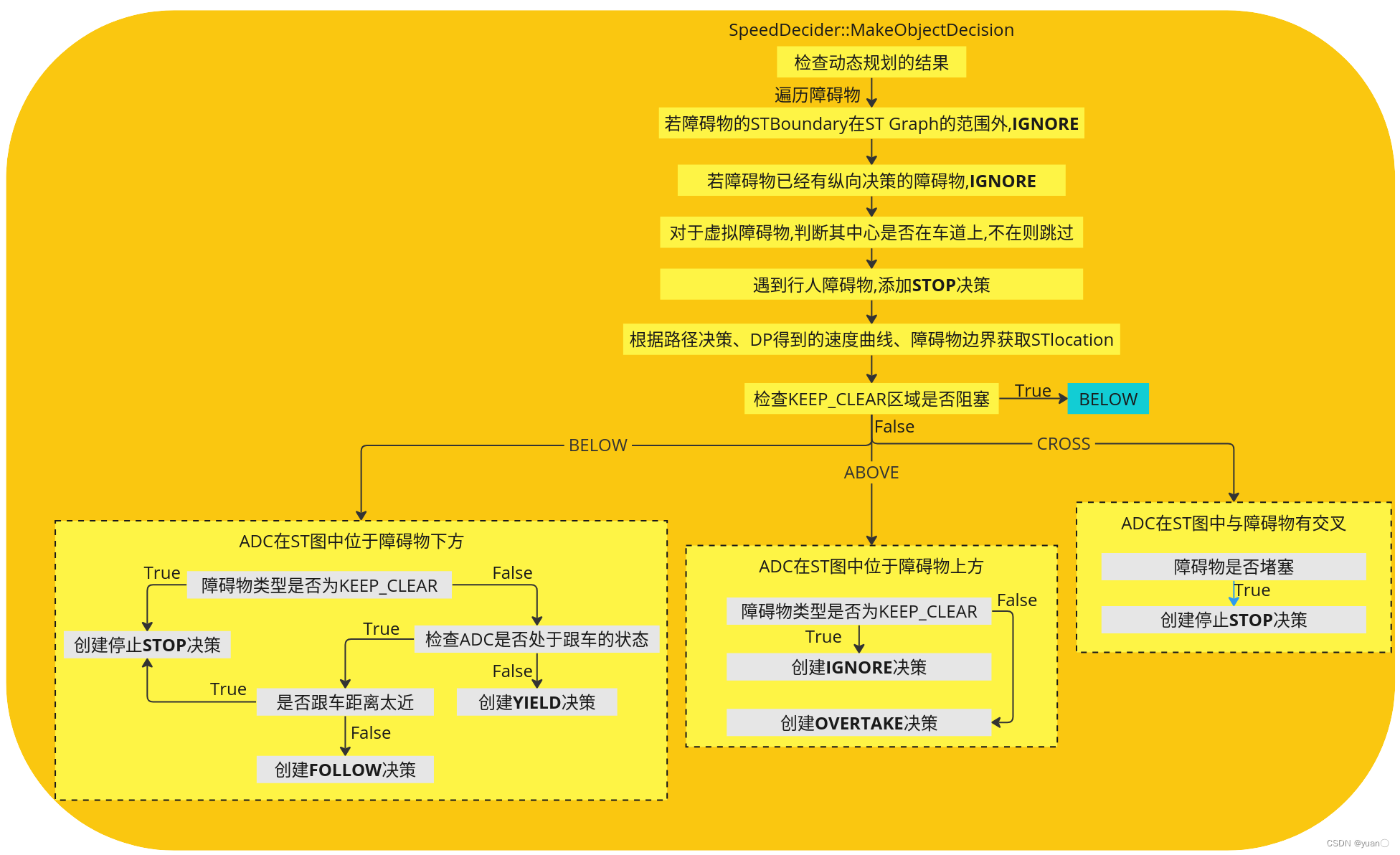
【Apollo学习笔记】——规划模块TASK之SPEED_DECIDER
文章目录 前言SPEED_DECIDER功能简介SPEED_DECIDER相关配置SPEED_DECIDER流程MakeObjectDecisionGetSTLocationCheck类函数CheckKeepClearCrossableCheckStopForPedestrianCheckIsFollowCheckKeepClearBlocked Create类函数 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_SPEED_OPTIMIZER
文章目录 前言PIECEWISE_JERK_SPEED_OPTIMIZER功能简介PIECEWISE_JERK_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_SPEED_OPTIMIZER流程QP问题的标准类型定义:优化变量设计目标函数约束条件相关矩阵二次项系数矩阵 H H H一次项系数向量 q q q设定OSQP求解参数 Process设…

【论文笔记】A Review of Motion Planning for Highway Autonomous Driving
文章目录 I. INTRODUCTIONII. CONSIDERATIONS FOR HIGHWAY MOTION PLANNINGA. TerminologyB. Motion Planning SchemeC. Specificities of Highway DrivingD. Constraints on Highway DrivingE. What Is at Stake in this Paper III. STATE OF THE ARTA. Taxonomy DescriptionB…

EM planner 论文阅读
论文题目:Baidu Apollo EM Motion Planner
0 前言 EM和Lattice算法对比
EM plannerLattice Planner参数较多(DP/QP,Path/Speed)参数少且统一化流程复杂流程简单单周期解空间受限简单场景解空间较大能适应复杂场景适合简单场景
…

Apollo基础 - Frenet坐标系
Frenet与笛卡尔坐标系的转换详细推导见:b站老王 自动驾驶决策规划学习记录(四) Apollo相关代码: modules/common/math/cartesian_frenet_conversion.h
#pragma once
#include <array>
#include "modules/common/mat…

【Apollo学习笔记】——规划模块TASK之SPEED_HEURISTIC_OPTIMIZER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程1. 对路程和时间进行采样以及速度限制2. 设计状态转移方程(cost计算)2.0 CalculateCostAt代价计算2.1 GetObstacleCost障碍物cost…

【论文笔记】Perception, Planning, Control, and Coordination for Autonomous Vehicles
单纯作为阅读笔记,文章内容可能有些混乱。 文章目录 1. Introduction2. Perception3. Planning3.1. Autonomous Vehicle Planning Systems3.2. Mission Planning3.3. Behavioral Planning3.4. Motion Planning3.4.1. Combinatorial Planning3.4.2. Sampling-Based P…
【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBoundary(Obstacle* obstacle)GetOverlapBoundaryPointsComputeSTBounda…

自动驾驶 | 决策规划岗位校招面试中常见的数学方法整理
文章目录 前言计算几何学求解方程的根无约束优化——求解函数极值 前言
前段时间,我mentor面试了一个决策规划方向实习的候选人,这个候选人是我母校的学生,算是我的学弟,跟我一个专业,他的老师是我学院的院长…

【强化学习】03 ——马尔可夫决策过程
文章目录 1. 马尔科夫决策过程(Markov Decision Process,MDP)1.1. 马尔科夫性质1.2. 状态转移矩阵1.3. 马尔可夫过程1.3.1. 一个简单的例子 2. 马尔可夫奖励过程2.1. 回报2.2. 价值函数 3. 马尔科夫决策过程3.1. MDP五元组3.2. 策略3.3. 价值函数3.3.1. 状态价值函数…
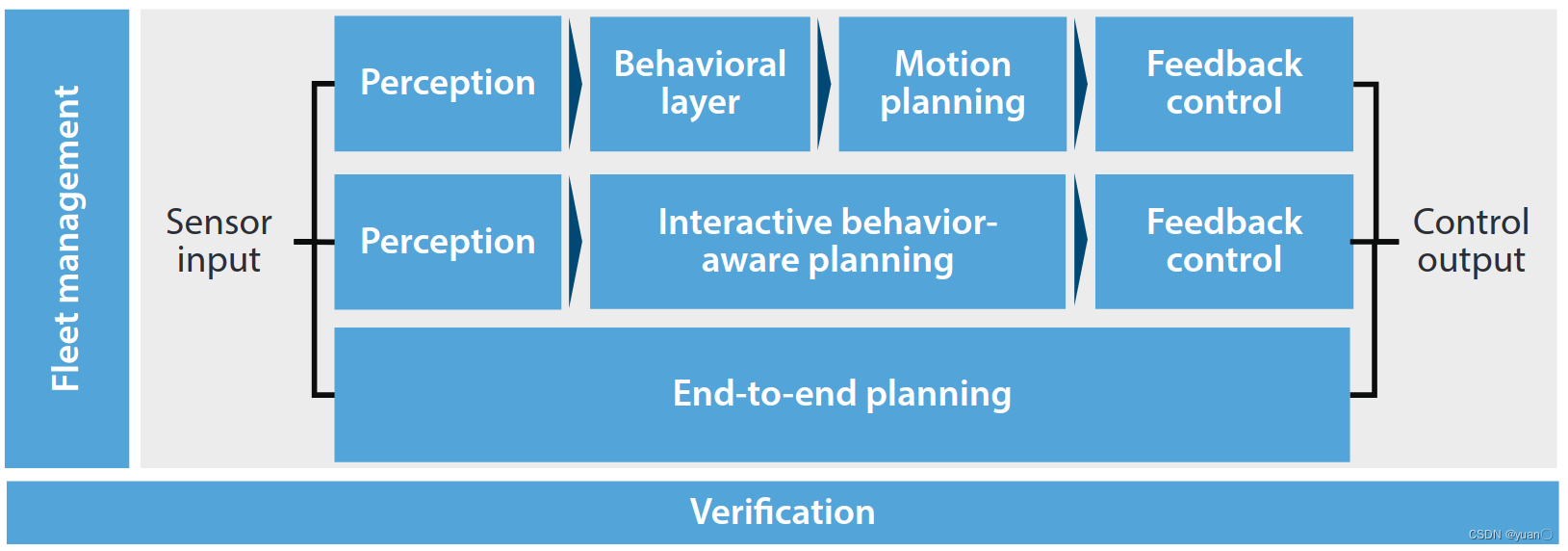
【论文笔记】Planning and Decision-Making for Autonomous Vehicles
文章目录 Summary1. INTRODUCTION2. MOTION PLANNING AND CONTROL2.1. Vehicle Dynamics and Control2.2. Parallel Autonomy2.3. Motion Planning for Autonomous Vehicles 3. INTEGRATED PERCEPTION AND PLANNING3.1. From Classical Perception to Current Challenges in Ne…
决策规划框架 - (解耦:路径规划和速度规划 | 耦合:行为规划和轨迹规划)
1 解耦策略
1.1 概述
核心思想: (1)路径规划:假定环境是“静态的”,将障碍物投影到参考路径上,并规划路径避开这些障碍物 (2)速度规划:根据路径规划给出的路径…