restful
asp.net
jvm
程序人生
两轮自平衡小车设计
贪心算法
孤立点
self-attention
grafana
gateway
端口映射
线性表
遥感预处理
遥感数据处理
vue3
软件测试工程师
camera
信息安全管理与评估
procast
B+树
imu
2024/4/13 1:22:17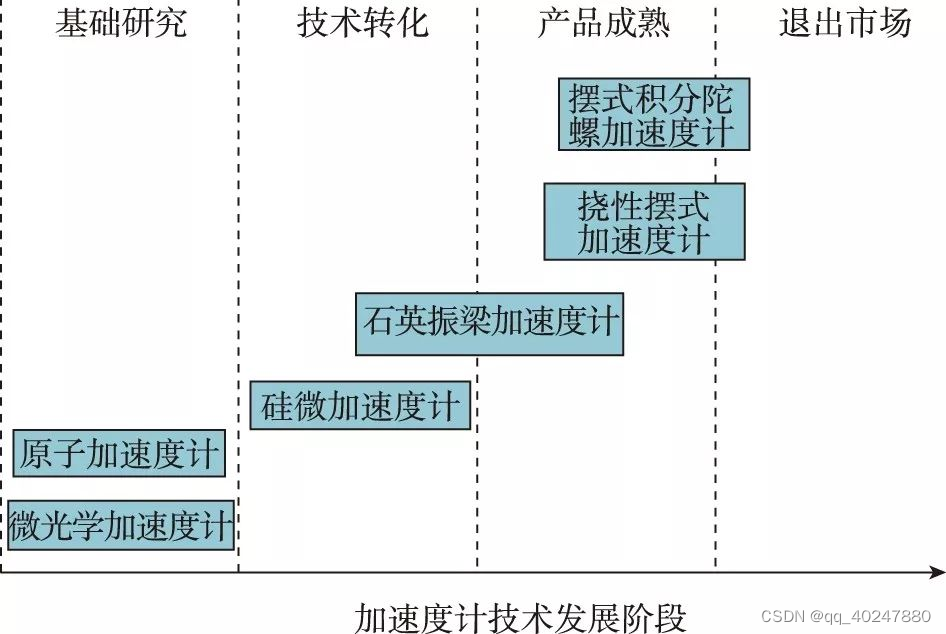
武汉大学惯性导航课程合集【2021年秋】1.1惯性导航和惯性器件
重力外力加速度 机械阻尼换为电阻尼,带宽提高取决于控制器响应速度 右方是不平衡跷跷板,测量顶面电容 机械中测量角速度的旋转编码器,测速电机测量的两个看得见实际物体的转子定子相对角速度,但是陀螺是相对于惯性参考系…
MATLAB - 读取双摆杆上的 IMU 数据
系列文章目录 前言
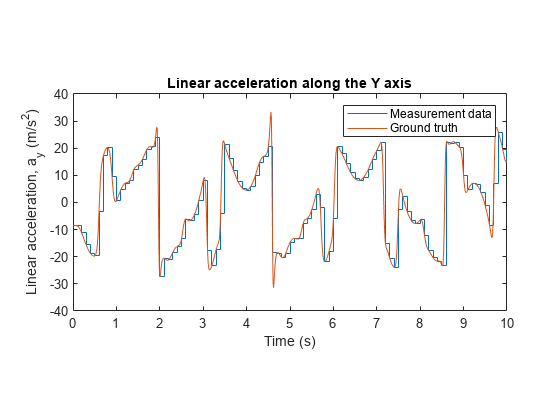
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…
自动驾驶传感器:惯性导航IMU原理
自动驾驶传感器:惯性导航IMU原理 附赠自动驾驶学习资料和量产经验:链接
组合导航里包含了GNSS卫星导航模块与IMU惯性导航模块,前一篇文章写了GNSS模块,本章写IMU惯导,也是本系列最后一篇文章。
1. 惯性测量单元&…

C++使用serial串口通信 + ROS2示例IMU串口驱动
目录 一、通信协议二、串口调试工具三、serial库的使用3.1 安装serial3.2 serial的使用3.3 绑定端口 四、编写IMU ROS2串口驱动 串行接口 (Serial Interface)简称串口(通常指COM接口),是采用串行通信方式的扩展接口&am…

什么是 IMU?惯性测量单元工作和应用
术语IMU代表“惯性测量单元”,我们用它来描述测量工具的集合。当安装在设备中时,这些工具可以捕获有关设备移动的数据。IMU 包含加速度计、陀螺仪和磁力计等传感器。 IMU 如何工作? IMU 可以测量各种因素,包括速度、方向、加速度、…

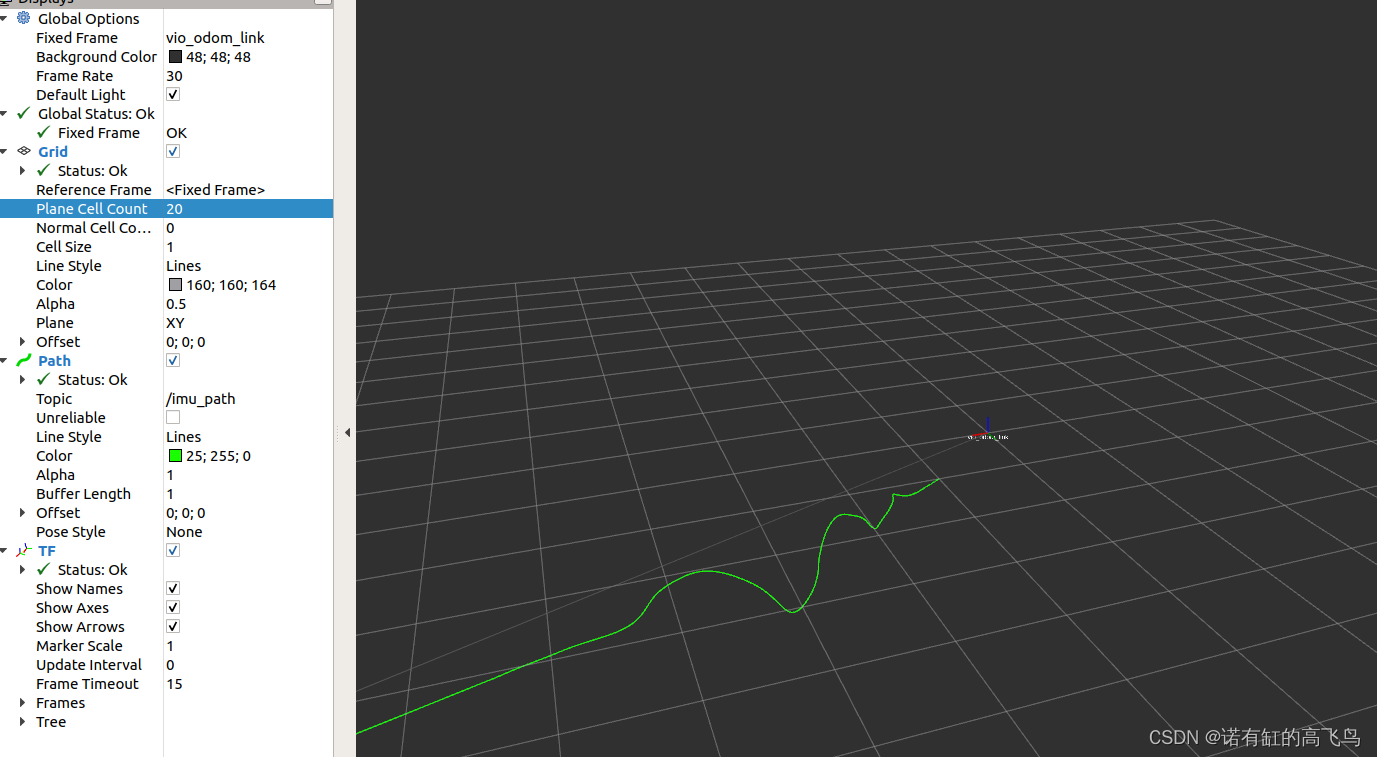
基于开源库imu_gps_localization进行组合导航
文章目录 概要数据准备准备工作运行复现结果参考概要
利用imu和GPS数据进行组合导航,在我的数据集上复现效果较差。
数据准备
https://github.com/ucr-robotics/citrus-farm-dataset
准备工作
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com…
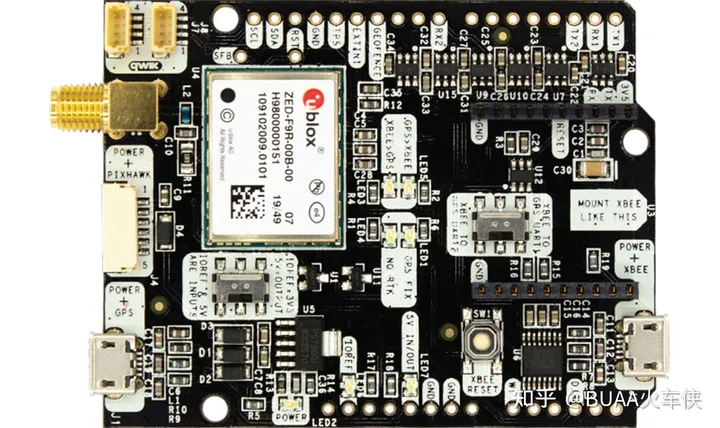
惯性传感器、磁力计、IMU、INS、GNSS、RTCM、RTK、双天线测向的定义
惯性传感器 Inertial Sensor (IS)陀螺仪:输出三轴角速度原始数据 加速度计加速度计:输出三轴加速度原始数据磁力计 Magnetometer输出三轴磁力计数据,可以测量地球磁场强度从而推算出磁航向惯性测量单元 Inertial Measurement Unit …
陀螺仪LSM6DSV16X与AI集成(4)----Qvar触摸电容配置
陀螺仪LSM6DSV16X与AI集成.4--Qvar触摸电容配置 概述视频教学样品申请源码下载生成STM32CUBEMX串口配置IIC配置CS和SA0设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置Qvar 功能的实现和配置设置量程和速率配置过滤链激活 Qvar 功能获取Qvar数据演示 概述
Qvar&#x…

IMU用于无人机故障诊断
最近,来自韩国的研究团队通过开发以IMU为中心的数据驱动诊断方法,旨在多旋翼飞行器可以自我评估其性能,即时识别和解决推进故障。该方法从单纯的常规目视检查跃升为复杂的诊断细微差别,标志着无人机维护的范式转变。
与依赖额外传…

浙江大学提出自感知IMU网络精准捕获3D变形
运动捕捉目前有两种主流方法,视觉捕捉能捕获复杂的三维几何变形,但依赖于昂贵的光学设备并且存在视线遮挡问题;基于IMU的方法虽然简便,但难以捕获细微的3D变形。为了解决这个问题,浙江大学的研究者们提出了一种可配置的…

移动机器人激光SLAM导航(二):运动控制与传感器篇
参考引用 机器人工匠阿杰wpr_simulation 1. 机器人运动控制
1.1 测试环境安装
wpr_simulation 安装$ mkdir -p catkin_ws/src
$ cd catkin_ws/src
$ git clone https://github.com/6-robot/wpr_simulation.git
$ cd wpr_simulation/scripts/
$ ./install_for_melodic.sh # 自…
Lord 3DMCV7-AHRS 时间同步硬件触发设置
目的:通过FPGA发送脉冲触发IMU采集数据。FPGA发送脉冲时,IMU才有数据产生。 FPGA与IMU的硬件接线就不讲了,这里主要说明的是IMU的设置以及ROS驱动的config文件更改。
1. WIN上位机设置
通过IMU在WINDOWS的上位机SensorConnect对IMU的GPIO、波特率等基本功能进行设值,具体…
MATLAB - 读取双摆上的 IMU 数据
系列文章目录 前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…
计算机视觉与深度学习 | 基于视觉惯性紧耦合的SLAM后端优化算法
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545
===================================================== 基于视觉惯性紧耦合的SLAM后端优化算法 引言视觉惯性联合初始化非线性优…

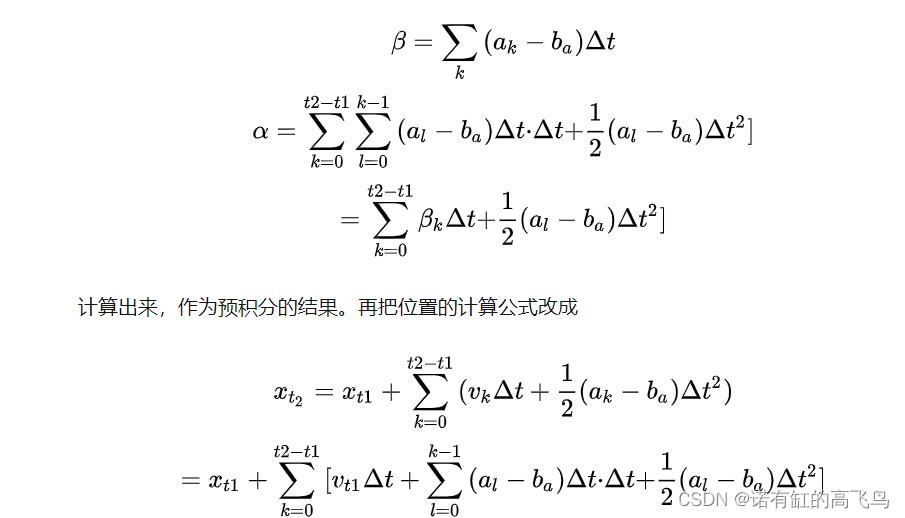
IMU预积分的过程详解
一、IMU和相机数据融合保证位姿的有效性: 当运动过快时,相机会出现运动模糊,或者两帧之间重叠区域太少以至于无法进行特征匹配,所以纯视觉SLAM对快速的运动很敏感。而有了IMU,即使在相机数据无效的那段时间内ÿ…
IMU预积分的简单理解
目录写在前面IMU预积分参考完写在前面
1、本文内容 IMU预积分的简单理解 2、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/125972298
IMU预积分
主要参考imu预积分原理的个人理解 https://zhuanlan.zhihu.com/p/438525032
重点ÿ…
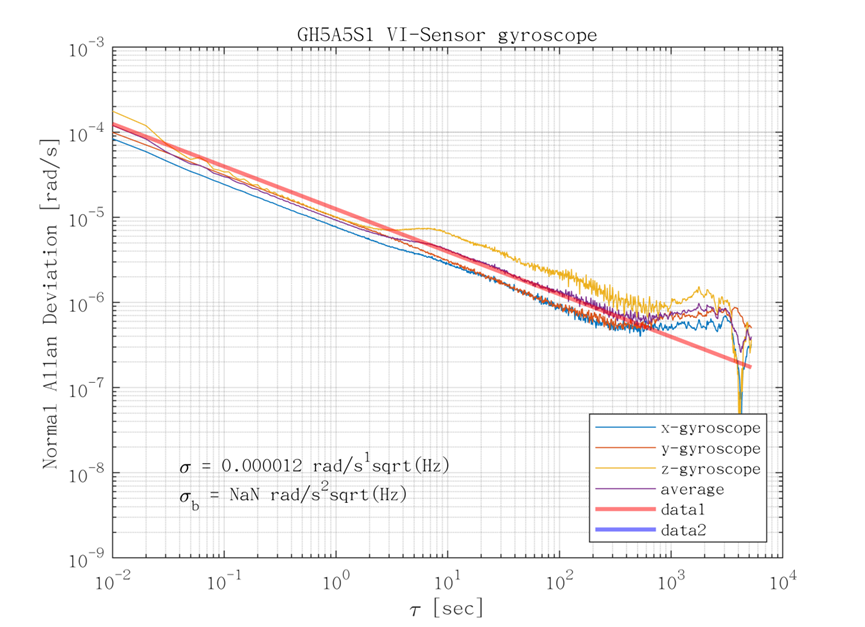
IMU参数辨识及标定
IMU参数辨识及标定
一、标定参数分析 标定的本质是参数辨识。首先明确哪些参数可辨识,其次弄清怎样辨识。 参数包括陀螺仪和加速度计各自的零偏、标度因数、安装误差。
IMU需要标定的参数主要是确定性误差和随机误差,确定性误差主要标定bias࿰…
【AI视野·今日Robot 机器人论文速览 第五十九期】Fri, 20 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 20 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
CCIL: Continuity-based Data Augmentation for Corrective Imitation Learning Authors Liyiming Ke, Yunchu Zhang, Abhay D…
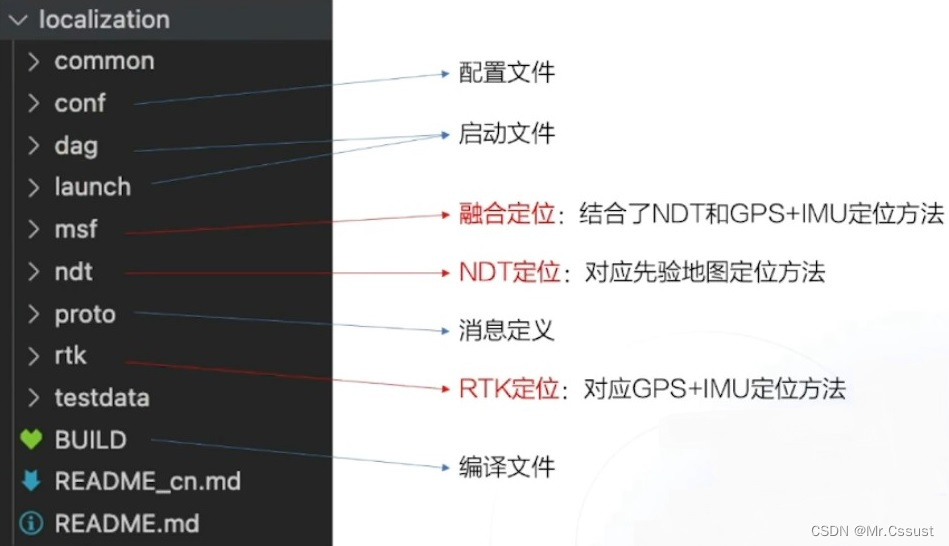
自动驾驶学习笔记(十二)——定位技术
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
卫星定位
RTK定位
IMU定位
GNSS定…
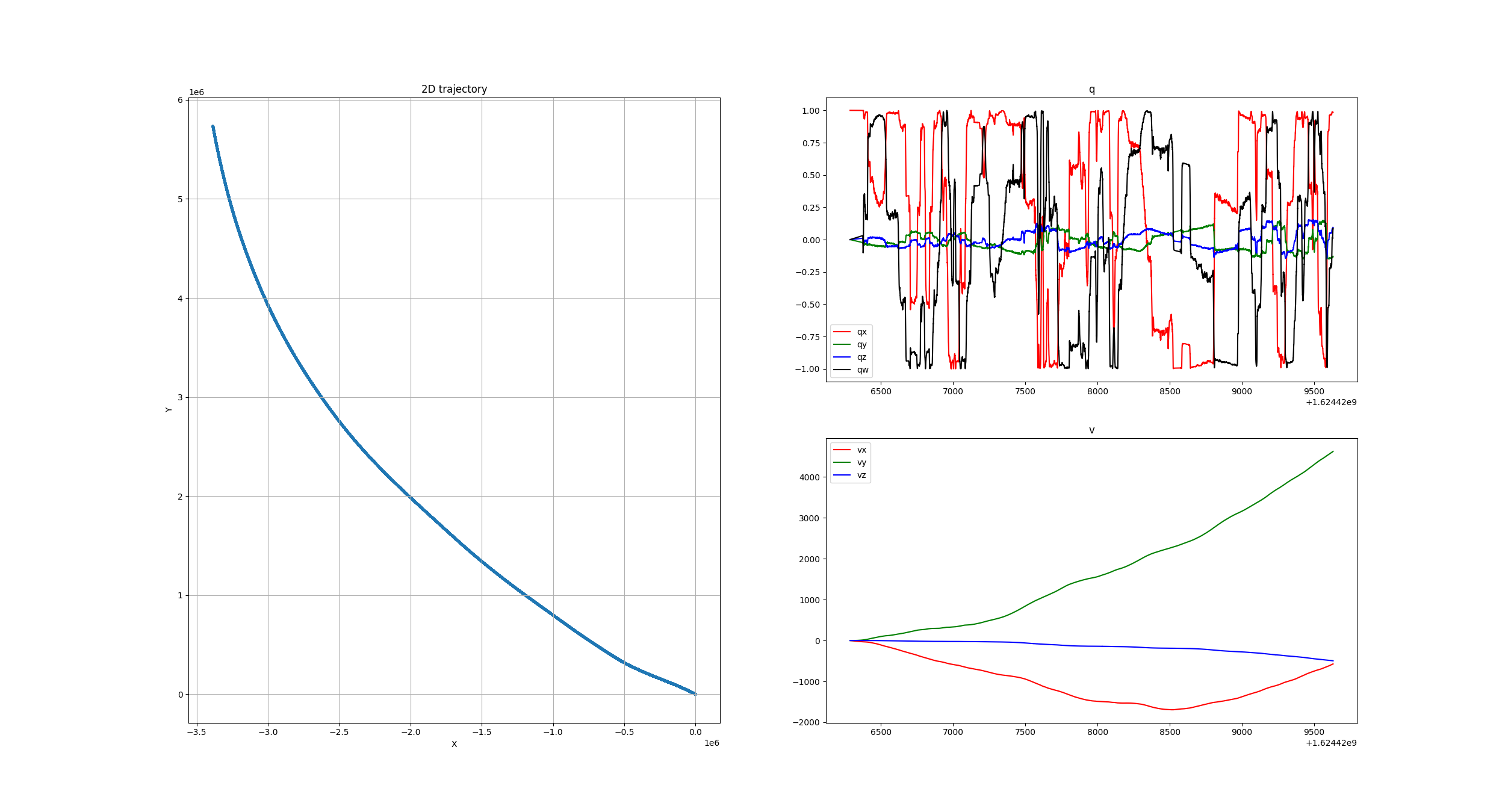
IMU 积分进行航迹推算
IMU 积分进行航迹推算 Reference https://github.com/gaoxiang12/slam_in_autonomous_driving 1.0 递推方程推导 \quad 连续时间内的 IMU 运动学方程: R ˙ R ω ∧ q 1 2 q ω ˙ p ˙ v v ˙ a \dot{\mathbf{R}}\mathbf{R}\omega ^{\wedge} \\ \dot{\mathbf{…

Windows源码安装INDEMIND双目惯性模组
最近电赛准备在Win10的平台上做一个增强现实眼镜,所以IMU相机也是必不可少的传感器,记录Windows源码安装INDEMIND双目惯性模组。 文章目录 实验环境一、配置准备1、SDK下载及准备安装2、安装CMake并添加环境变量3、设置".sln"文件的默认打开方…

IMU用于汽车前照灯调平
研究者进行了以创新车辆中的自动前照灯调平的实验,这是夜间驾驶安全的关键功能。这项科学探索围绕着使用低成本的MEMS IMU(微机电系统惯性测量单元)来估计道路和车辆前照灯之间的俯仰角,确保最佳的前照灯光束调节并减少迎面而来的…

IMU在网球运动伤害预防中的作用
来自悉尼大学的研究团队最近的一项实验探讨了上肢网球损伤及其与球员使用的正手击球技术的关联。开发的可穿戴技术配备了惯性测量单元 (IMU),可以深入分析前臂肌肉活动、握力和冲击传递——这些成分与肘部肌腱病等慢性损伤有关。
采用IMU传感…

足部IMU在复杂场景中行走定位
随着微机电系统(MEMS)技术的快速发展,基于MEMS的惯性导航系统(INS)在任意环境的基站定位方面发挥着至关重要的作用。惯性导航具有自主性强、定位频率高、功耗低、实时性强等特点。因此更适合单兵作战、反恐行动、应急救…