pandas
使用
https
存储型XSS
android-studio
类似LABVIEW
心理健康管理系统
Pyhton
ROBOGUIDE
医学统计学
idea
RE理论干扰源的分析
网页设计
简便轻巧的UML流程图制作工具
远程医疗
普林斯顿大学
因果AI
断裂力学
nvidia
逻辑运算符
humble
2024/4/12 8:36:07
ros2+gazebo+urdf:ros2机器人使用gazebo的urdf文件中的<gazebo>部分官网资料
原文链接SDFormat extensions to URDF (the gazebo tag) — Documentation
注意了ros2的gazebo部分已经跟ros1的gazebo部分不一样了: Toggle navigation SpecificationAPIDocumentationDownload
Back
Edit Version: 1.6 Table of C…

ros2不同版本的差异 foxy galactic humble rolling
ros2不同版本的差异 foxy galactic humble rolling
ROS2的每个版本都有其特点和改进。以下是关于Foxy, Galactic, Humble和Rolling版本的一些关键差异:
Foxy Fitzroy (2020-06-05)
针对LTS(长期支持)版本,支持时间为3年。 引入…
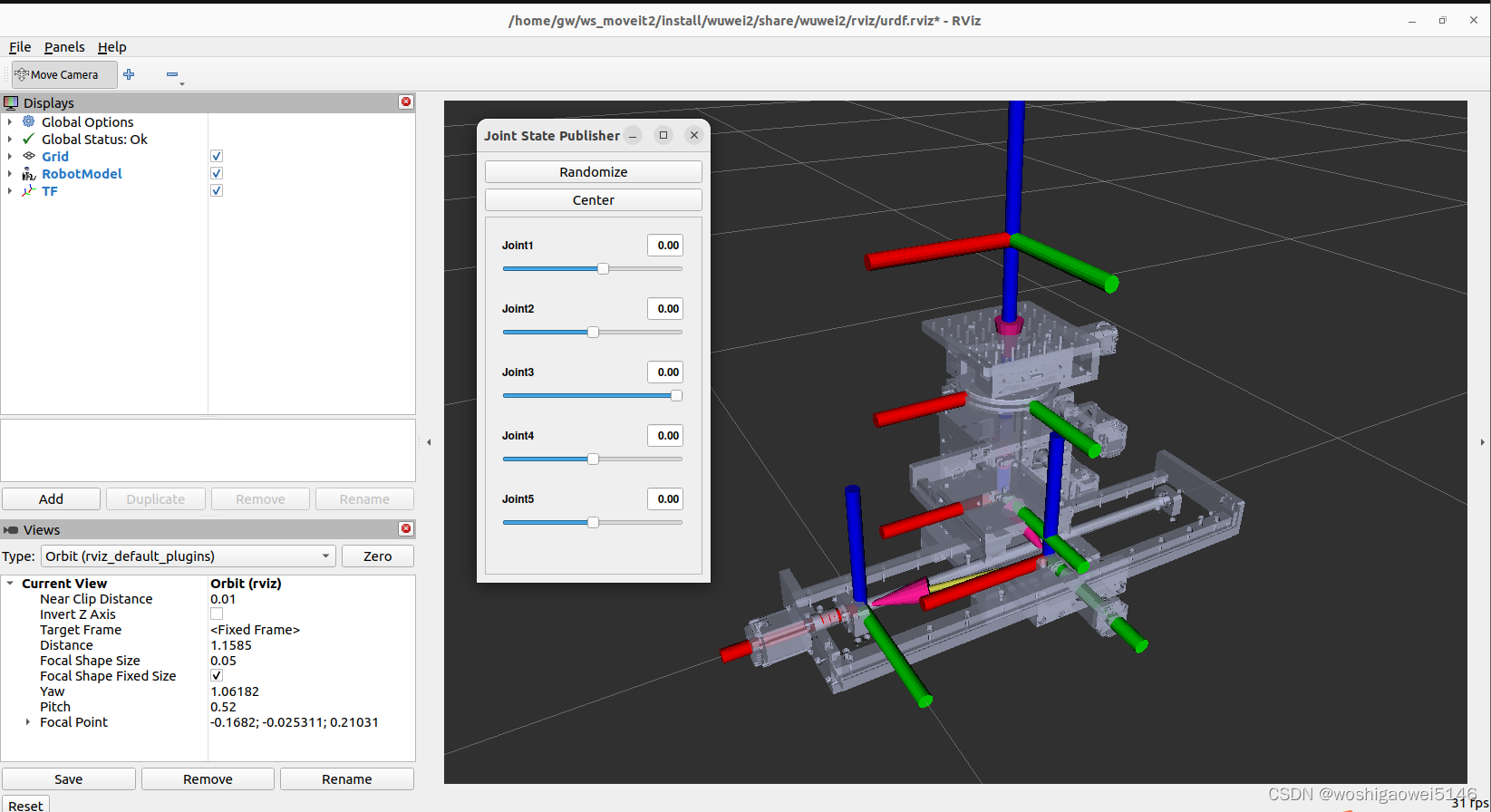
Solidworks导出URDF总结(Humble)
环境
Solidwoks2021 SP5;Ubuntu22.04;ROS2 Humble;
步骤
基本步骤参考:Solidworks导出URDF总结(Noetic) 本文只介绍不同之处。
将solidworks生成的文件夹(我这里为wuwei2)移动到/ws_moveit2…
木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装
ROS2的humble安装
1、系统配置ubuntu 22.04
假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04
2、humble安装
ros版本选择humb…