小程序
调用
华为云
kotlin
cloud alibaba
abapgit
博通蓝牙vendor
aws
pcb工艺
前置++和后置++
cisp证书
Junit使用的基本流程
深浅拷贝
canvas
3D游戏建模
舌头
思科设备
组合模式
Golang云原生
Gerber
fanuc
2024/4/13 19:12:13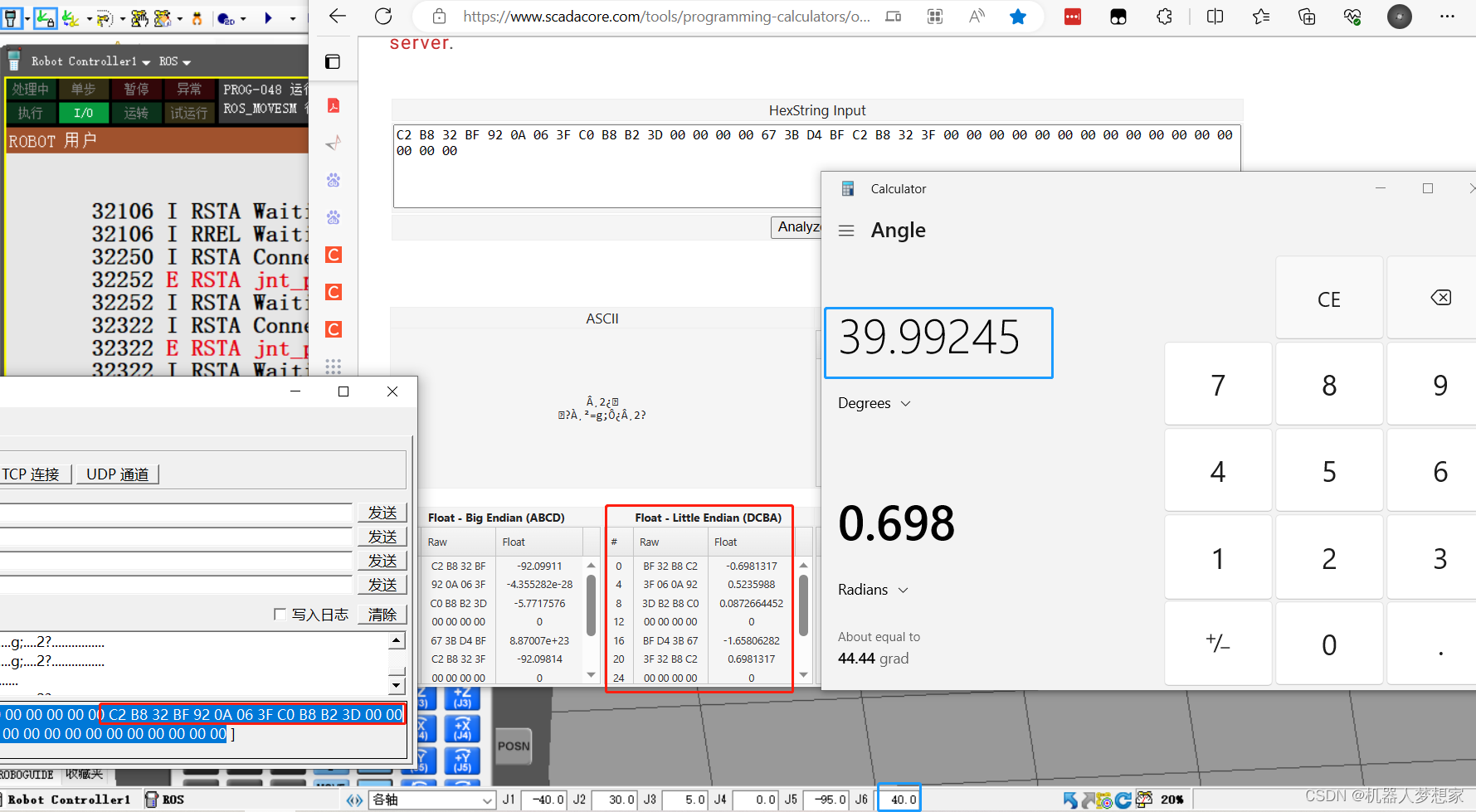
一文学会配置Fanuc控制柜端ROS2驱动
文章目录 前言一、RobotGuide是什么?二、实现步骤创建机器人工作单元导入程序TP程序Karel程序 构建程序配置控制柜配置机器人控制柜通讯配置可同时运行程序数量配置ROS_RELAY变量配置ROS_STATE变量设置启用标志 三、测试机器人状态反馈机器人命令接收整体运行测试 总…
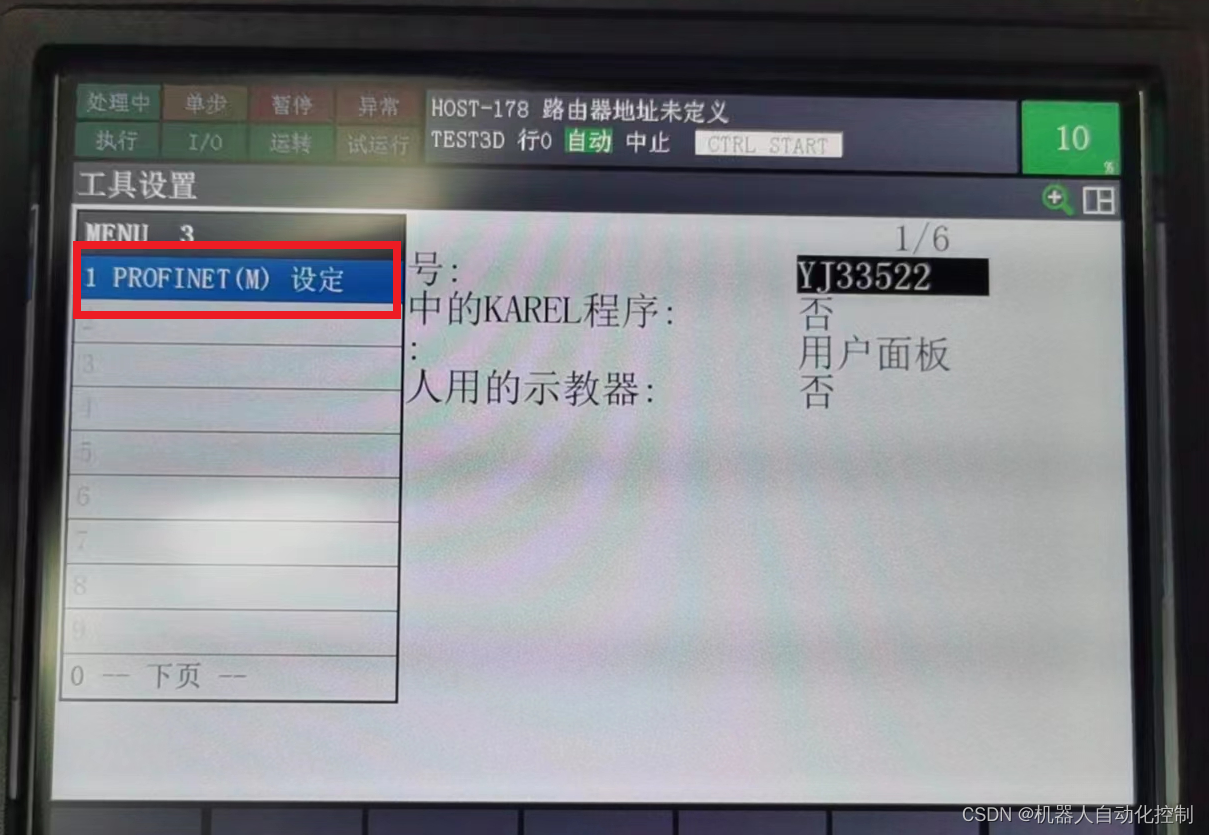
fanuc机器人安装profinet IO基板产生报警
fanuc机器人安装profinet IO基板产生报警: SYST-302 请关闭电源 PRIO-397 PMIO 固件需要更新 %x %x 问题描述:新的R30iB‐Plus柜的GSDML 文件与R30iB柜的GSDML文件是不同的,GSDML文件与R834固件版本不匹配的话,会无法扫描到R834的卡,导致无法通讯
解决方法:确认 Expecte…