相关文章

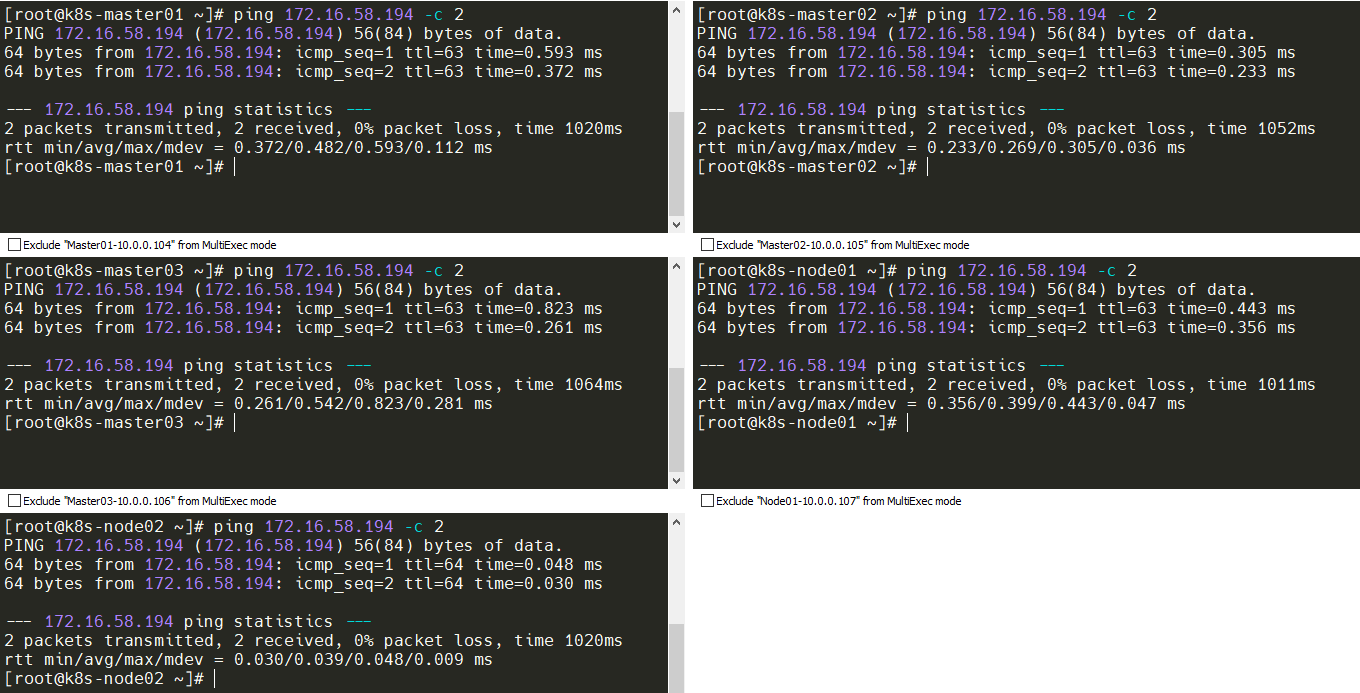
13:大数据与Hadoop|分布式文件系统|分布式Hadoop集群
大数据与Hadoop|分布式文件系统|分布式Hadoop集群 Hadoop部署Hadoop HDFS分布式文件系统HDFS部署步骤一:环境准备HDFS配置文件 查官方手册配置Hadoop集群 日志与排错 mapreduce 分布式离线计算框架YARN集群资源管理系统步骤一:安装…

(C语言) time库-日期和时间工具
文章目录 ⏰介绍⏰常量⏱️CLOCKS_PER_SEC ⏰类型⏱️tm⏱️time_t⏱️clock_t⏱️timespec (C11) ⏰函数-时间操作⏲️time🏷️返回纪元开始经过的当前系统日历时间⏲️clock🏷️返回未加工的程序启动时开始经过的处理器时间⏲️difftime🏷️…
结构化思维助力Prompt创作:专业化技术讲解和实践案例
最早接触 Prompt engineering 时, 学到的 Prompt 技巧都是: 你是一个 XX 角色…
你是一个有着 X 年经验的 XX 角色…
你会 XX, 不要 YY..
对于你不会的东西, 不要瞎说!…对比什么技巧都不用, 直接像使用搜索引擎一样提问, 上面的技巧对于回复的效果确实有着 明显提升. 在看了 N…
蓝桥杯-常见的数学方法
常见的 数学方法
Math类表示数学类,因为Math类中的数学方法都被定义为static 形式,所以子啊程序中可以直接通过Math类的类名调用某个数学方法,语法格式如下:
取最大值
max(double a,double b)
取最小值
min(double a,double …
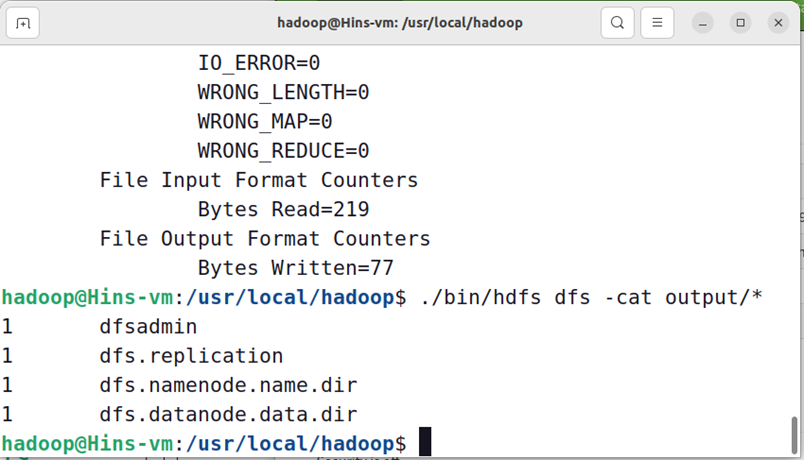
【Hadoop大数据技术】——Hadoop概述与搭建环境(学习笔记)
📖 前言:随着大数据时代的到来,大数据已经在金融、交通、物流等各个行业领域得到广泛应用。而Hadoop就是一个用于处理海量数据的框架,它既可以为海量数据提供可靠的存储;也可以为海量数据提供高效的处理。 目录 &#…
Flinksql实时计算——group by key和 group by key 带窗口聚合有什么不同
在 Flink SQL 中,GROUP BY key 和 GROUP BY key 带窗口聚合的主要区别在于它们如何处理数据的时间维度和计算结果的粒度。 简单的 GROUP BY key:当使用简单的 GROUP BY 对 key 进行聚合时,你会得到一个按指定 key 分组的静态聚合结果。这个聚合是基于 key 的所有历史数据进行…

微信小程序实现上拉加载更多
一、前情提要
微信小程序中实现上拉加载更多,其实就是pc端项目的分页。使用的是scroll-view,scroll-view详情在微信开发文档/开发/组件/视图容器中。每次上拉,就是在原有数据基础上,拼接/合并上本次上拉请求得到的数据。这里采用…